Tutorial on creating custom digital LEGO Minifigures.
I used to own LEGO Ideas Book 6000 when I was a child and still own a copy. The two main characters in this story, Bill and Mary, are not available in any of the major LEGO digital design software packages, such as LEGO Digital Designer, Stud.io or Mecabricks. Time to learn something new. This tutorial will show you how to create your own custom digital LEGO Minifigure.
Frist, I had to create the decals for both figures, since the original minifigures had stickers. I used Adobe Illustrator to create the graphics and Bricklink’s PartDesigner to create the custom LEGO parts.
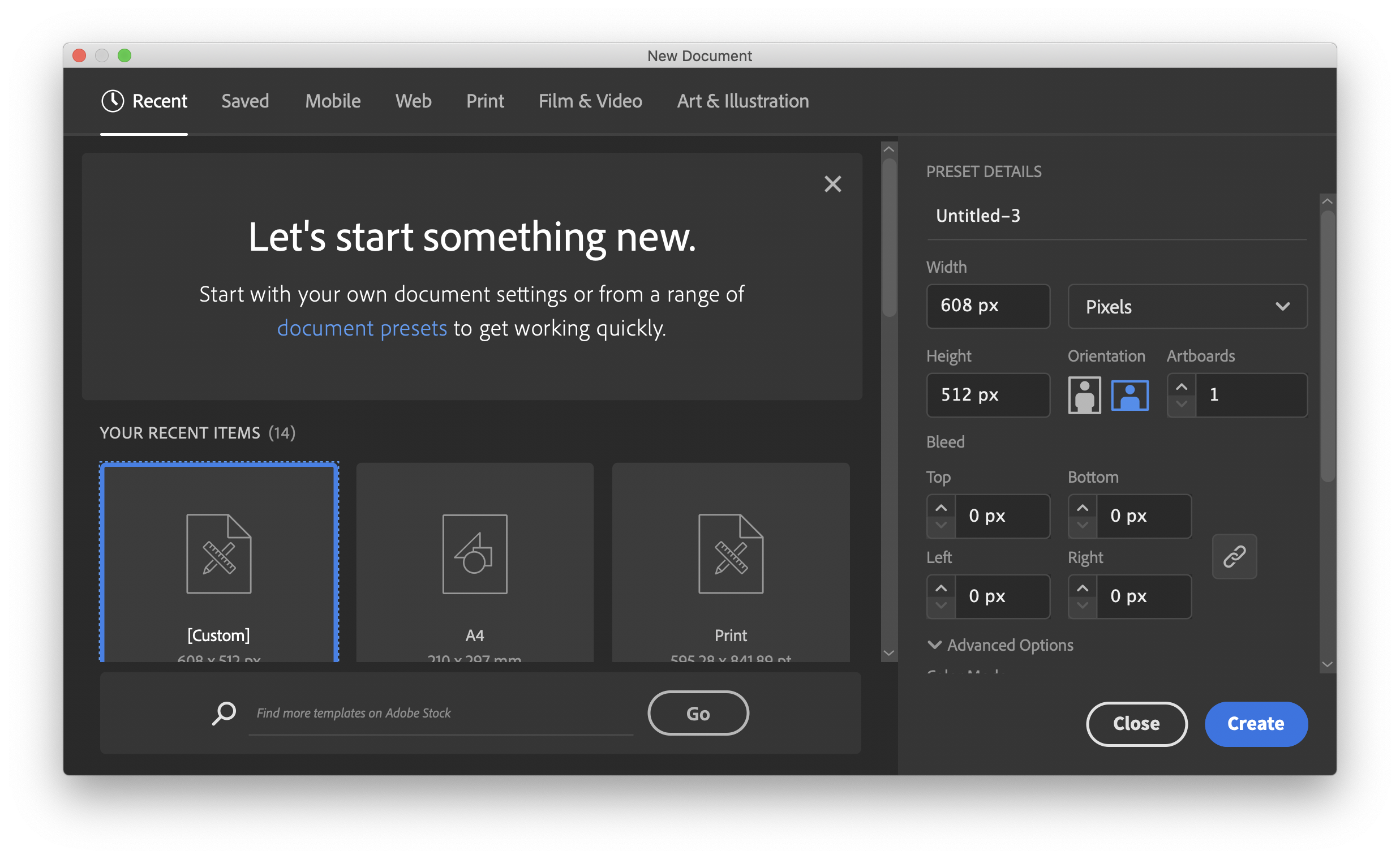
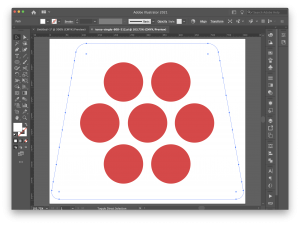
For the decal design, I used some of the available shape templates. PartDesigner’s manual has the specific dimensions: 605×512 pixels. So let’s start with creating a new Illustrator document with these dimensions.

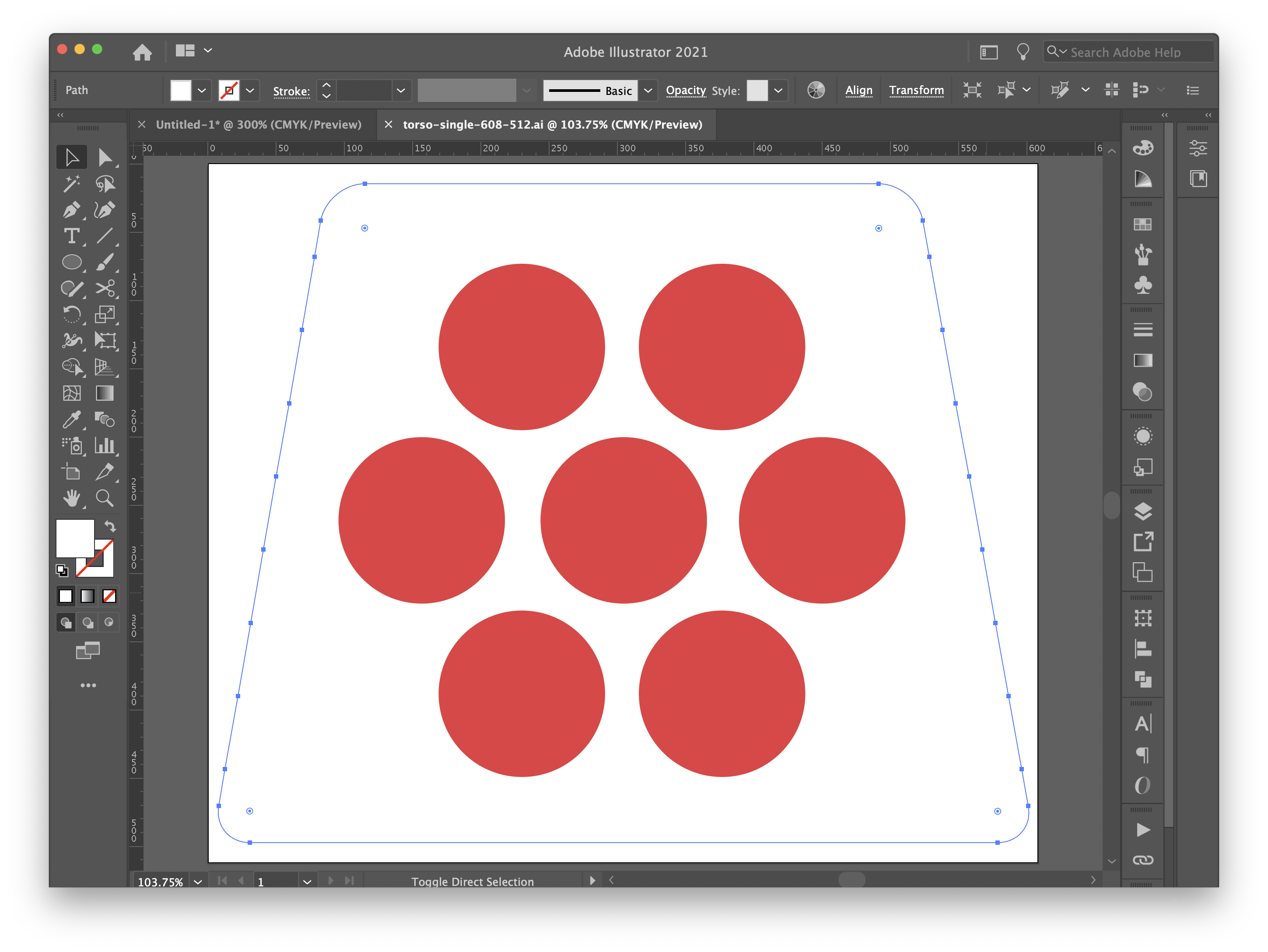
Next, we create the artwork without a background layer, since this will give us transparency later.
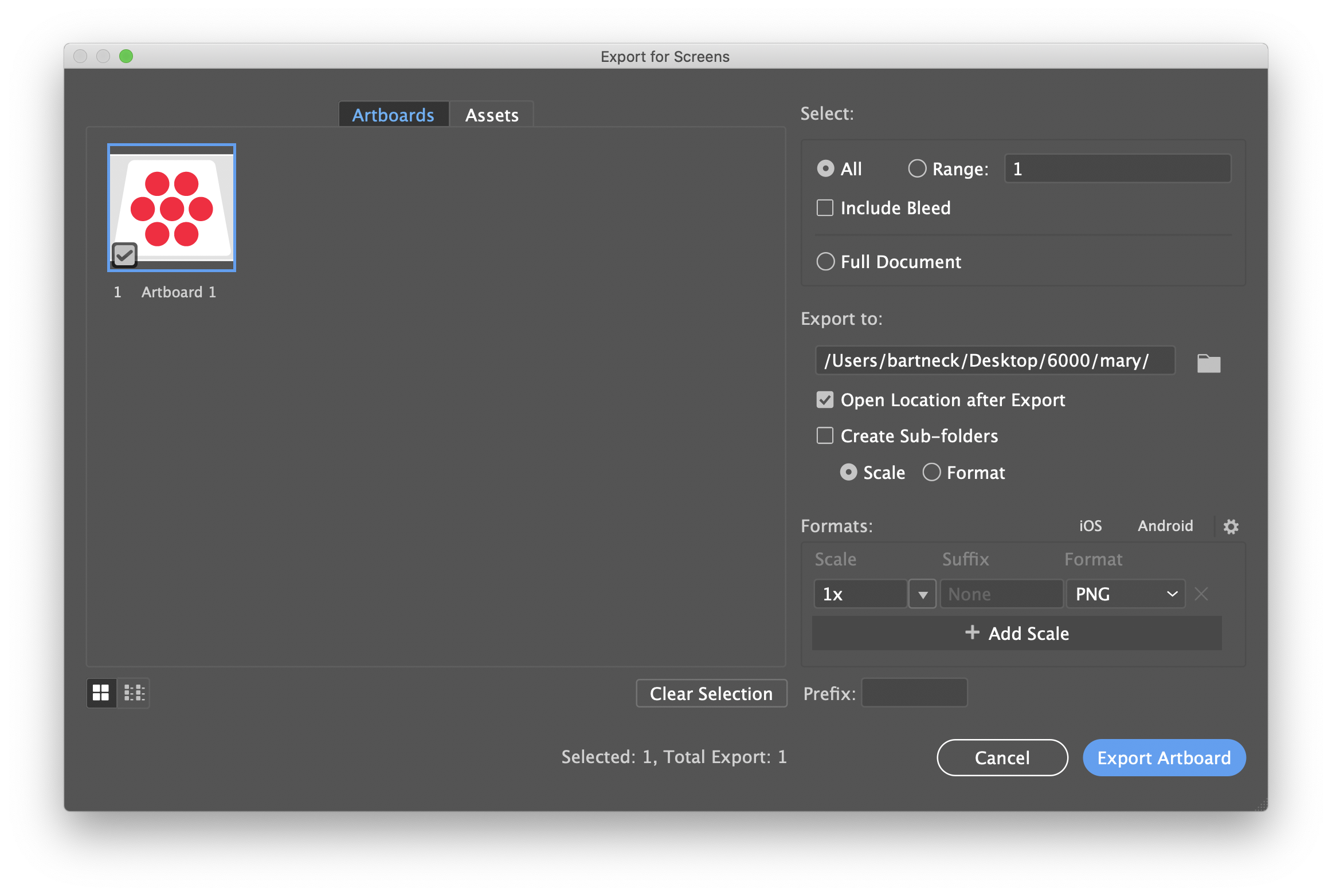
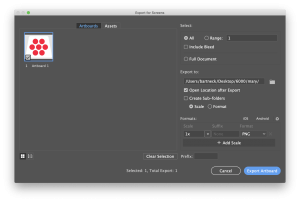
Now it is time to export the graphics as a png file.
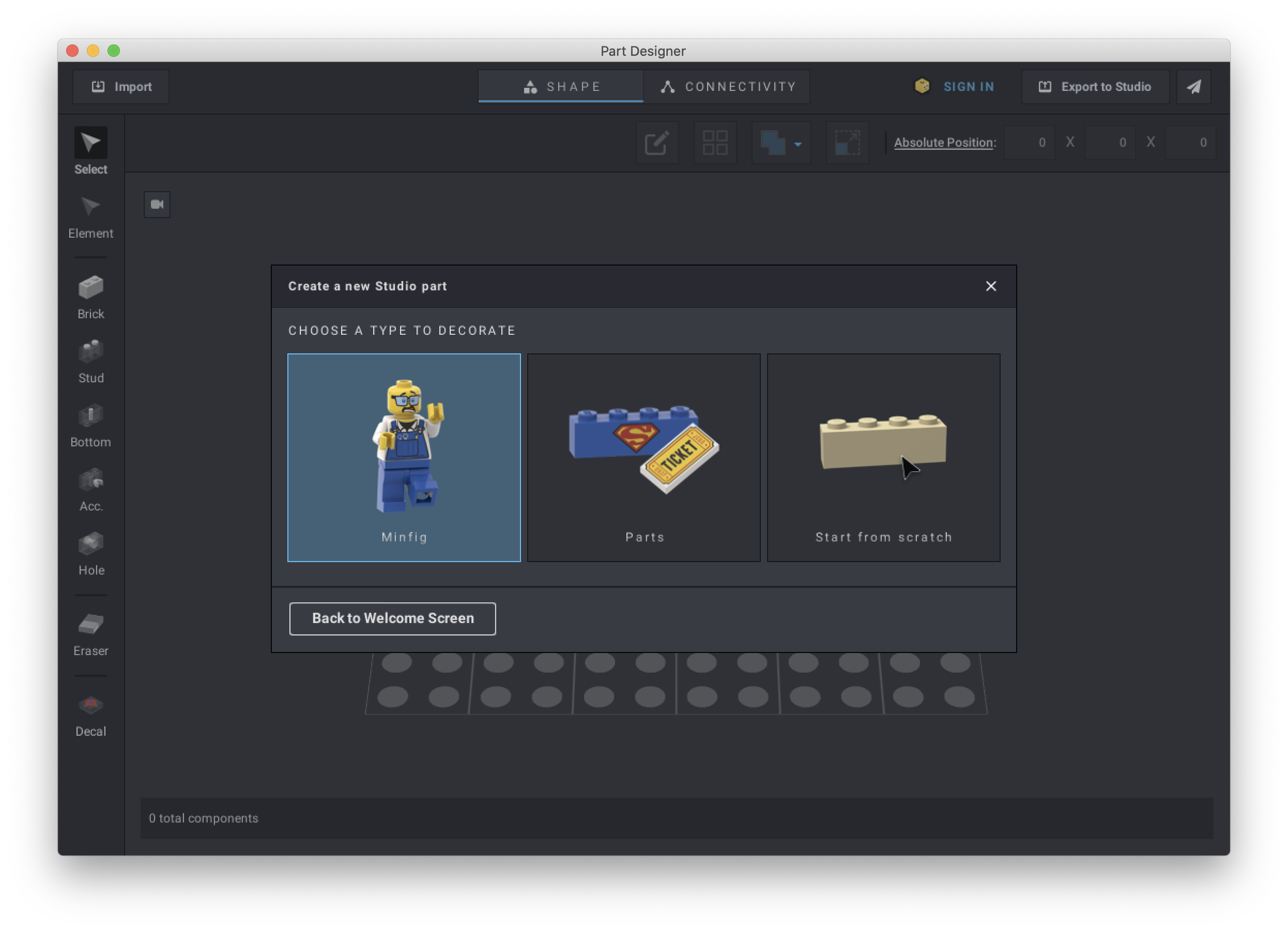
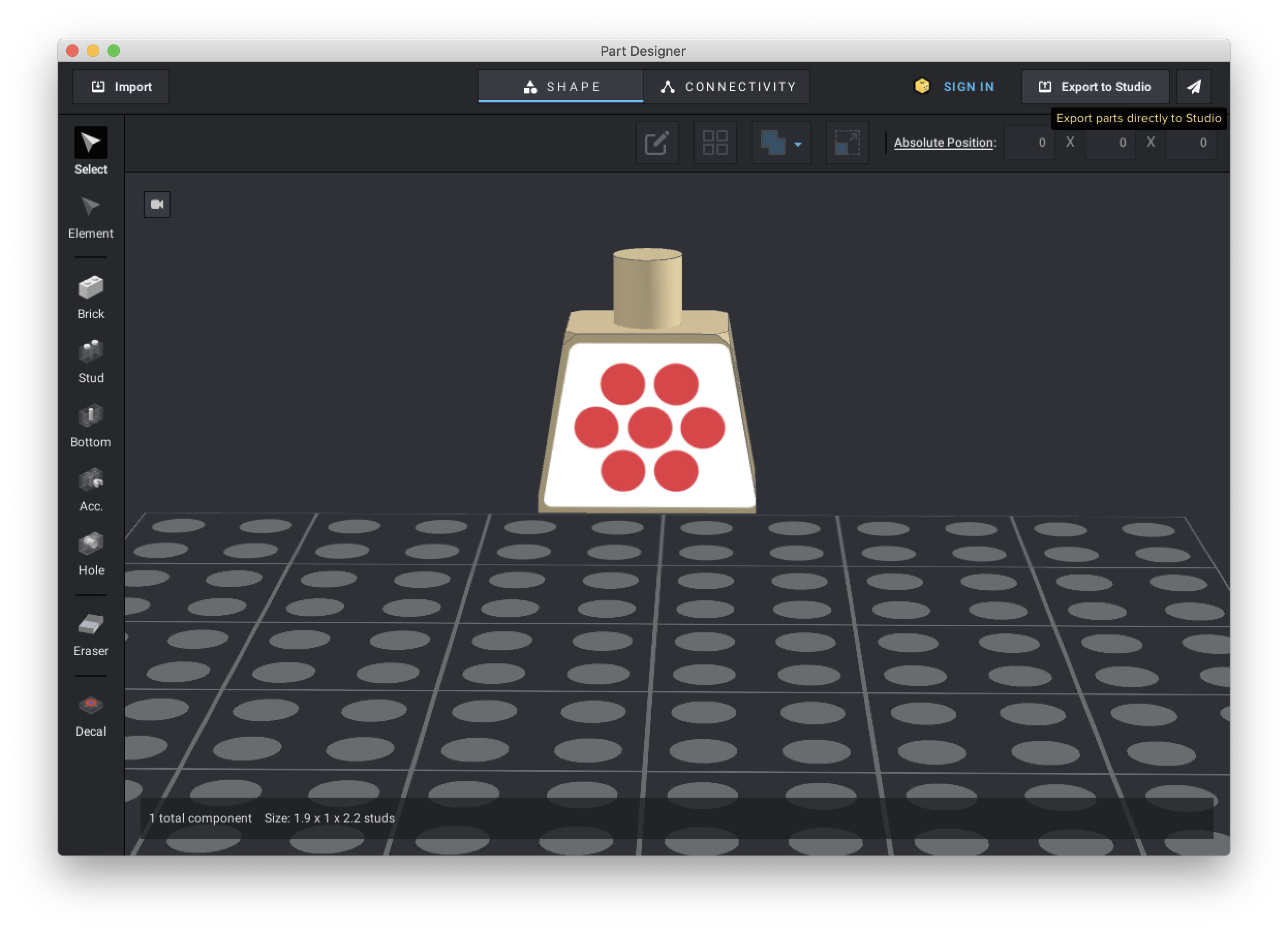
Download and install PartDesigner. When you create a new document, use the minifigure template.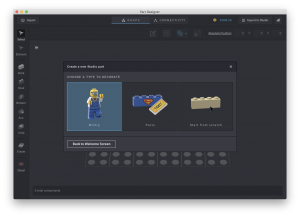
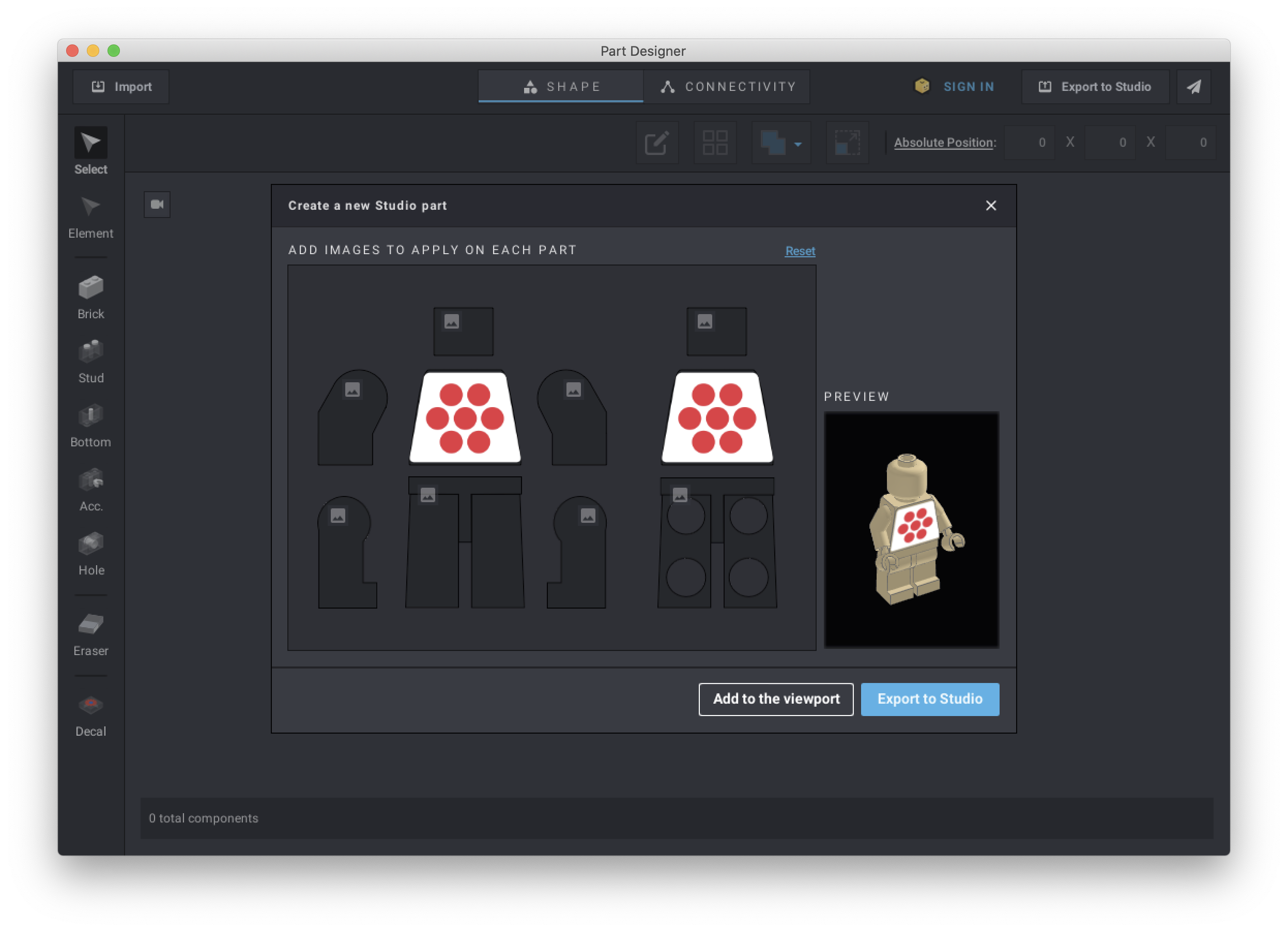
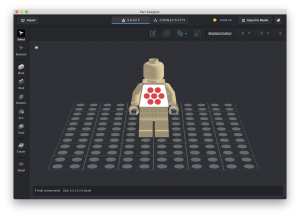
Click on the little mountain icons on the torso and select the PNG file we just created.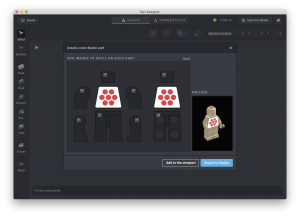
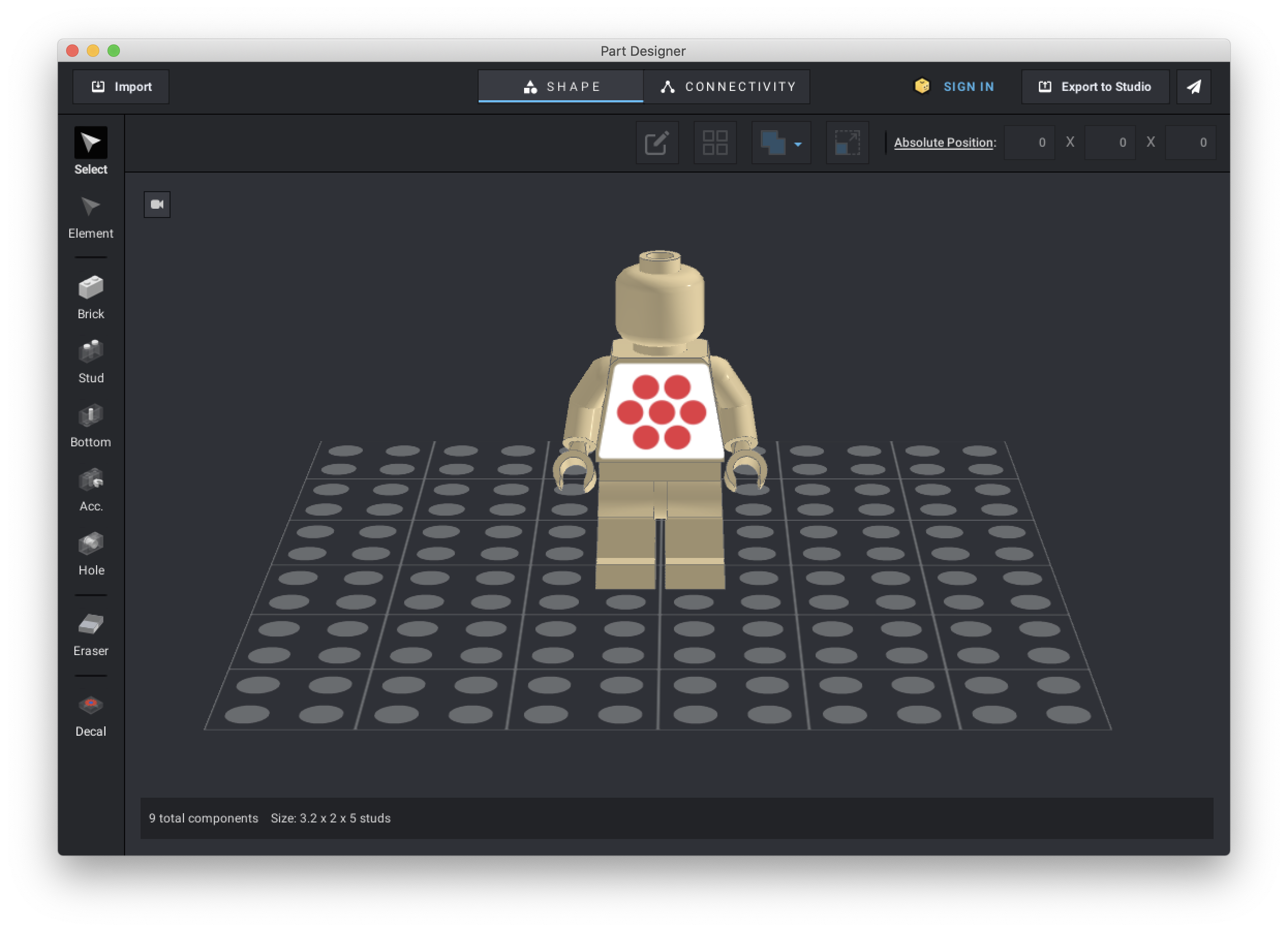
Add the model to the viewport.
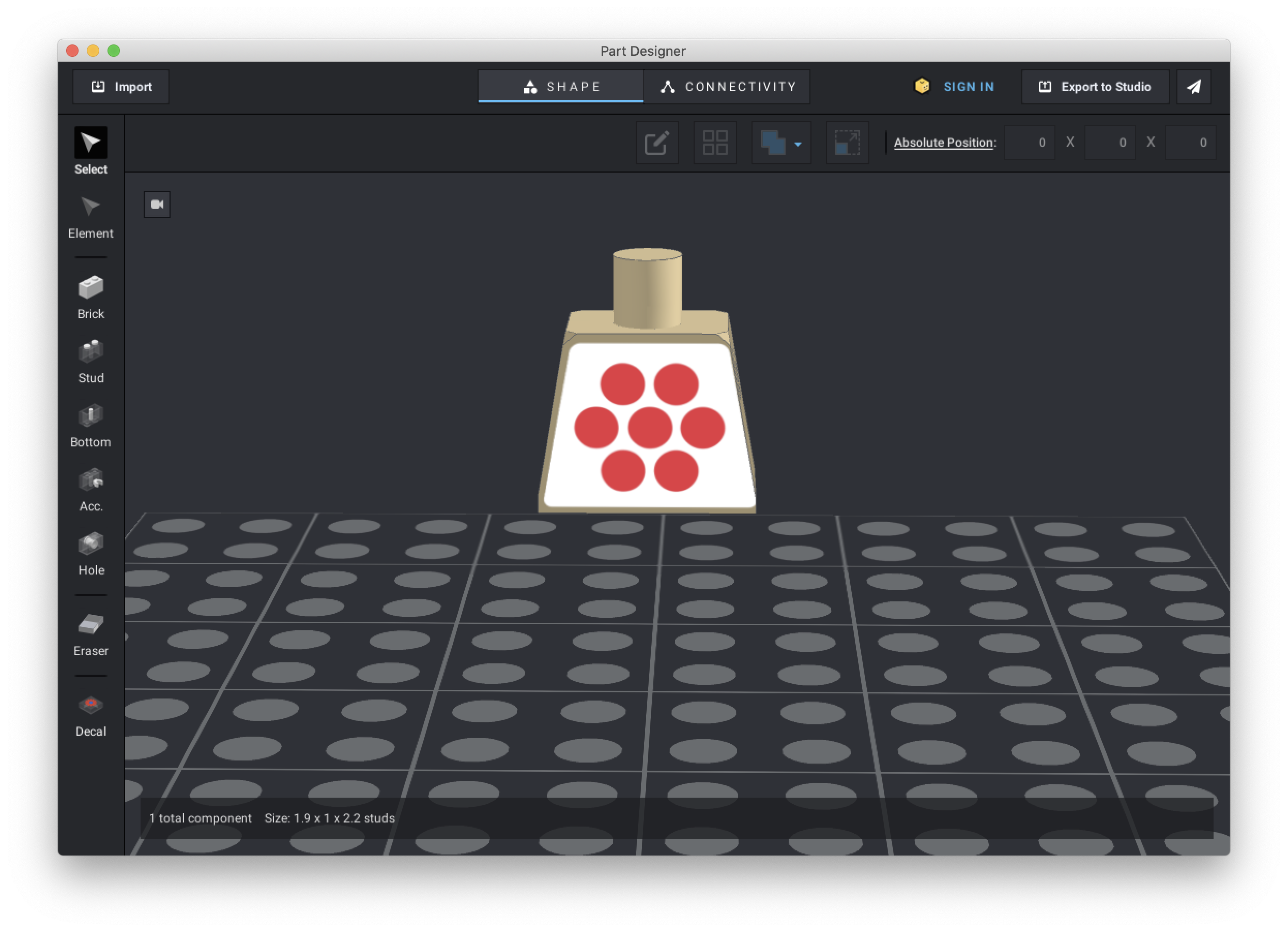
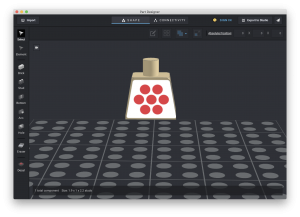
We can now delete the legs, arms and head.
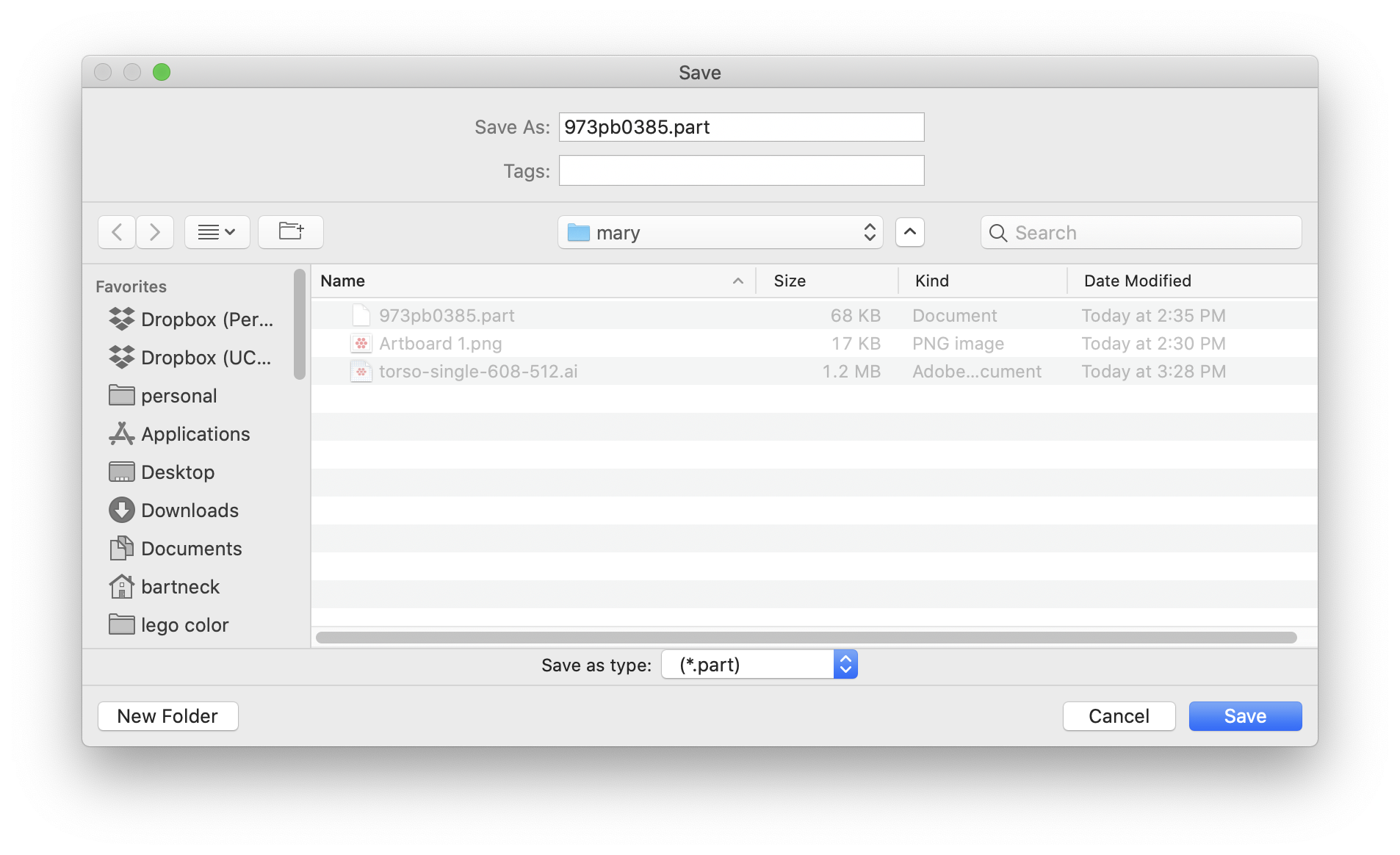
Next, it is time to safe the new part, ideally with its official LEGO number.
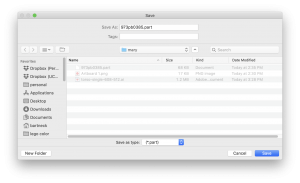
Only the torso of Bill and Mary are unique and I uploaded 973bp0386.part (Bill’s torso) and 973pb0385.part (Mary’s torso) to my website.
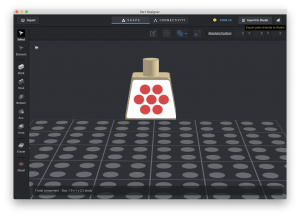
Now, we can export the parts to Stud.io. Make sure that you give the part meaningful names and include the proper LEGO ID number is the optional section.
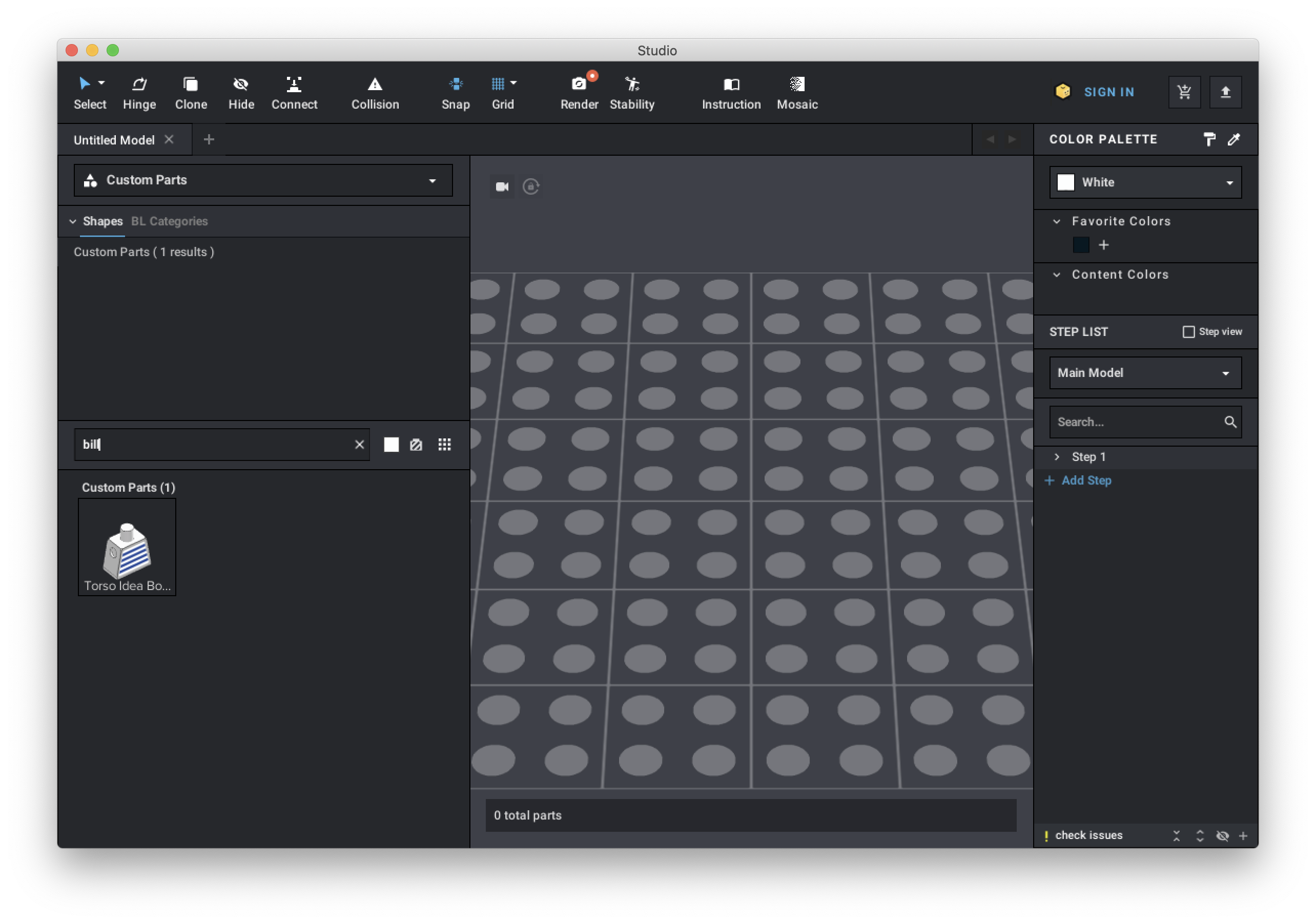
In studio, we have to select the custom parts library.
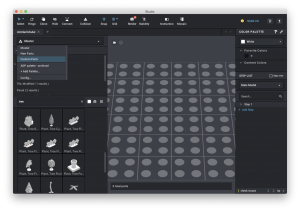
We can search now for Bill and find this part.
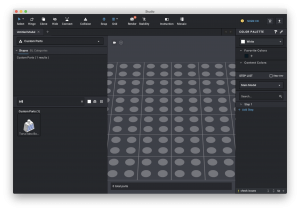
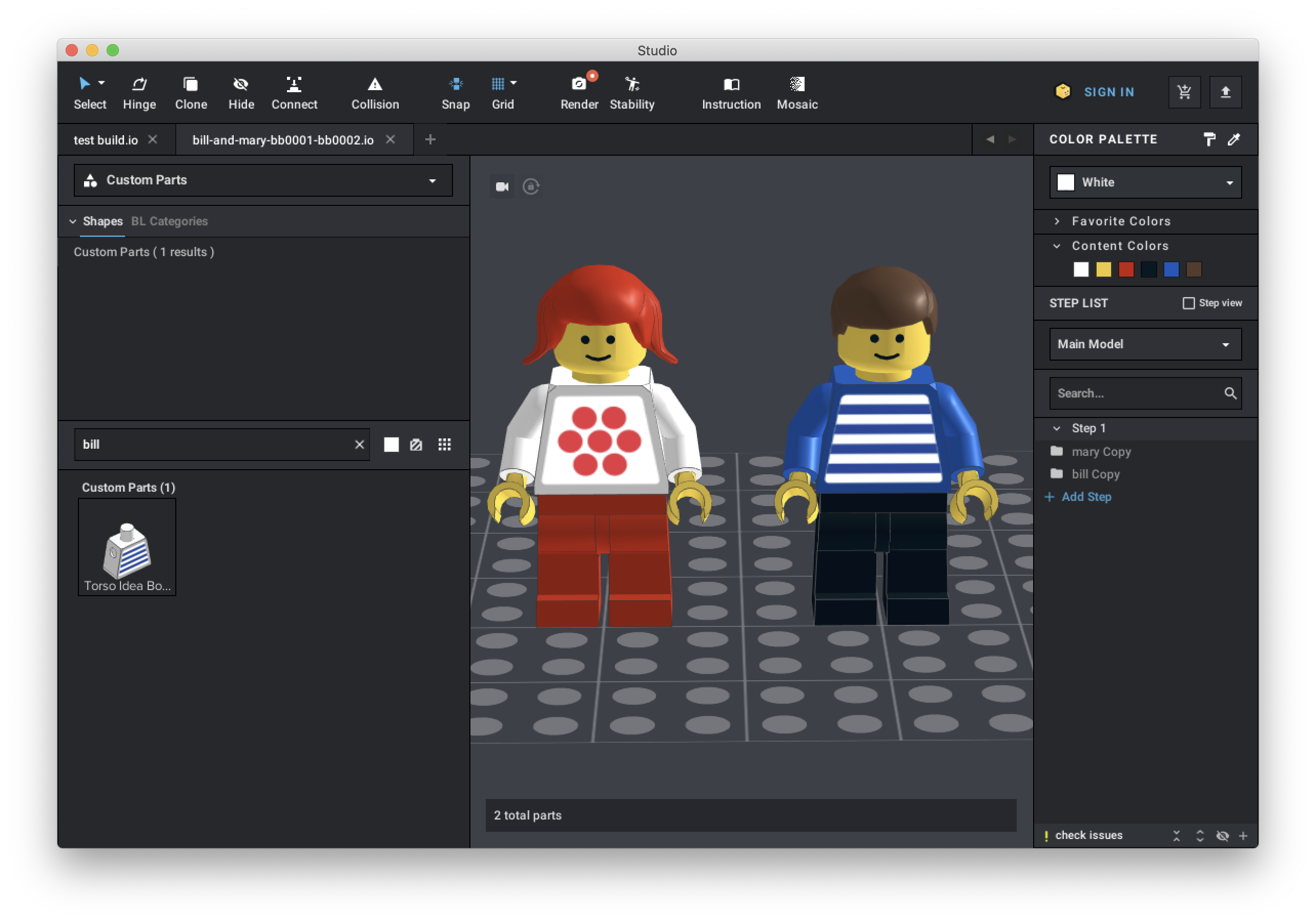
Drag and drop the torso into the scene and add the other parts to the model. The complete model is available for download here.
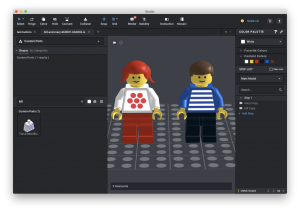
Now we can add some original models from the LEGO Idea Book 6000, some roads and greenery and we have a perfect first shot.

I hope you enjoyed this little tutorial on how to create custom digital minifigures.