In October 2023 I had the privilege to talk at the Nerd Night in Christchurch. This event series operates at the intersection of comedy, popular culture and science. I talked about my adventures in exploring the peer review process. Some of them to the annoyance of my fellow scientists, conference organizers and predatory publishers. But always with a nod to comic effect and a focus on the overcompetitive beast we call academia.
In 2020 I recorded a podcast episode entitled “Why do all social robots fail in the market?“. I interviewed Tomas Concha from NTT Disruption, the company that had bought the commercially unsuccessful robot Jibo. I already had my doubts about NTT Disruption in 2020. In 2023 NTT Disruption was disrupted. Meaning that it closed down and with it Jibo. This does seem to be the end for this little useless robot.
But don’t worry! Other companies continue to build largely useless robots that are not much more than smartphones on wheels. Have a look at Samsung’s Ballie robot.
The idea of a smart home robot is not new. Amazon developed their Astro robot, but did not sell it to the general public. LG is also presenting a robot at CES2024 with roughly the same features.
I wonder if Samsung or LG will sell their robots to consumers. Or is this just another robot PR gag?
There are many important computer scientists and innovators. I created a small and very personal list and created posters to honour their contributions.
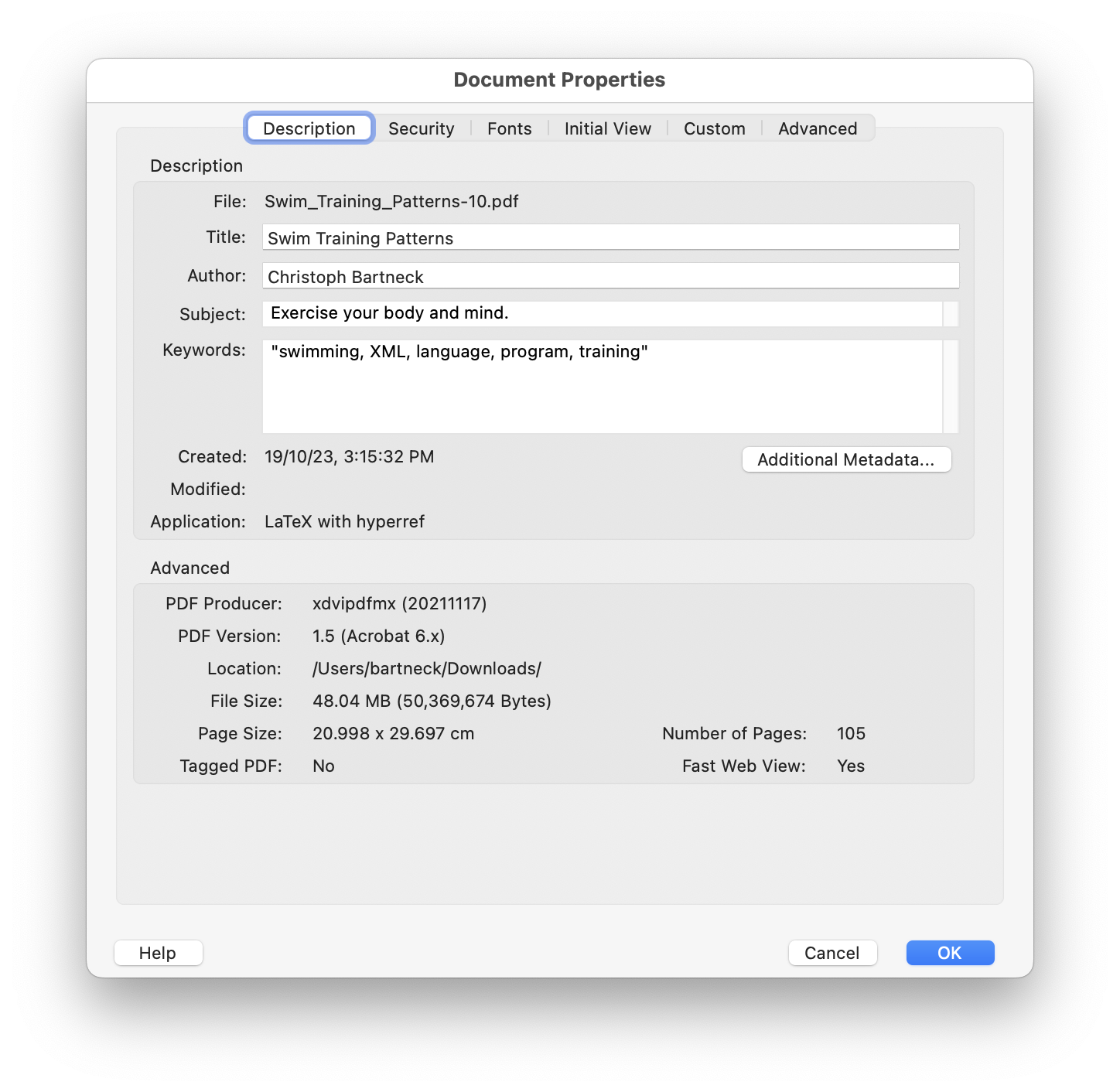
Adobe’s PDF format has become a standard for the exchange of beautiful documents. Let’s start with some less obvious options for the meta data of PDF documents. These are important for search engines, both online and locally, to correctly index your document. It can dramatically improve the ranking of your documents.
Acrobat knows title, author, subject and keywords to describe your document:
In LaTeX, these options can be set using the popular hyperref package. I barely create any LaTeX project without it. You can setup the meta data for the PDF document with pdftitle, pdfauthor, pdfsubject and pdfkeywords:
\usepackage{hyperref}
\hypersetup{
pdftitle={Swim Training Patterns},
pdfauthor={Christoph Bartneck},
pdfsubject={Exercise your body and mind.},
pdfkeywords={swimming, XML, language, program, training},
pdfpagemode={UseOutlines},
pdfcenterwindow={true},
pdfdisplaydoctitle={true},
pdffitwindow={true},
pdfpagelayout={SinglePage},
pdfstartview={Fit},
pdflang={en-US},
}
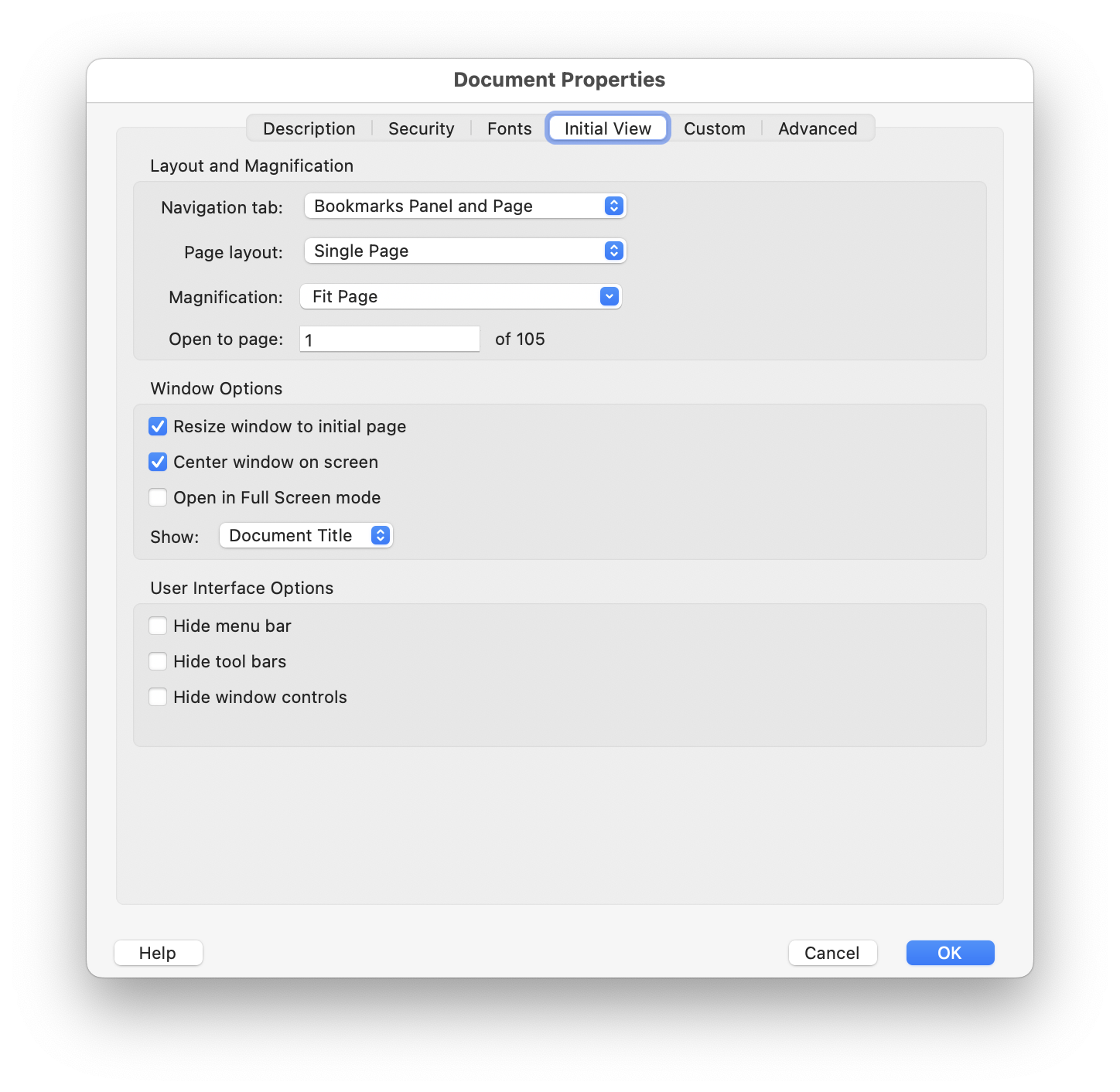
Acrobat also offers options for how PDFs are displayed when first opened:
Important options here are the presence of the bookmarks. These will be based on the headlines used in your LaTeX code (pdfpagemode). I normally use a single page for the layout (pdfpagelayout) that is fitted to the screen (pdfstartview). The enclosing window can be resized to the initial page (pdffitwindow) and centred on the screen (pdfcenterwindow). Last, it makes sense to use the document title for the window title instead of the file name (pdfdisplaydoctitle).
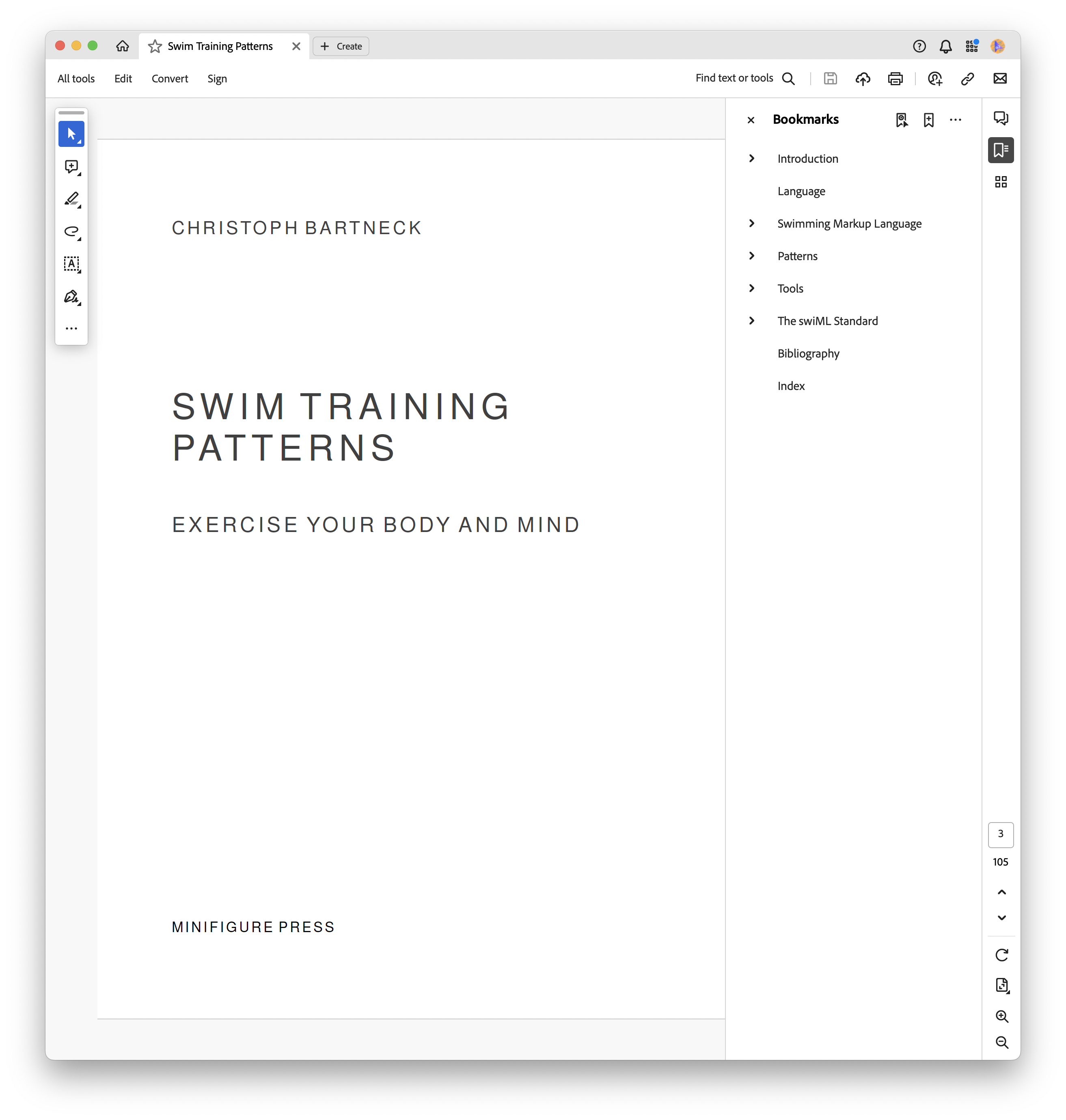
If you set all these parameters, you get a beauatiful and functional PDF that gives a perfect first impression when the user opens it.
I enjoy creating generative art with Patternodes. I created a short tutorial that shows how to program the Chains pattern shown in my last post. Once I had figured it out it was easy but the path was as usual a bit challenging.