DOI: 10.1007/s00146-006-0052-7 | CITEULIKE: 895016 | REFERENCE: BibTex, Endnote, RefMan | PDF ![]()
Bartneck, C., Suzuki, T., Kanda, T., & Nomura, T. (2007). The Influence of People's Culture and Prior Experiences with Aibo on their Attitude Towards Robots. AI & Society – The Journal of Human-Centred Systems, 21(1-2), 217-230.
The influence of people’s culture and prior experiences with Aibo on their attitude towards robots
Department of Industrial Design
Eindhoven University of Technology
Den Dolech 2, 5600MB Eindhoven, NL
christoph@bartneck.de
Graduate School of Sociology, Toyo University,
5-28-20, Hakusan, Bunkyo-ku, Tokyo 112-8606, Japan
suzukirt@h9.dion.ne.jp
IRC, Department 2
ATR Media Information Science Laboratory
2-2-2 Hikaridai, Seika-cho
Soraku-gun, Kyoto 619-0288, Japan
kanda@atr.jp
Department of Media Informatics, Ryukoku University,
1-5, Yokotani, SetaOhe-Cho, Otsu, Shiga 520-2194, Japan
nomura@rins.ryukoku.ac.jp
Abstract - This paper presents a cross-cultural study on peoples’ negative attitude toward robots. 467 participants from seven different countries filled in the negative attitude towards robots scale survey which consists of 14 questions in three clusters: attitude towards the interaction with robots, attitude towards social influence of robots and attitude towards emotions in interaction with robots. Around one half of them were recruited at local universities and the other half was approached through Aibo online communities. The participants’ cultural background had a significant influence on their attitude and the Japanese were not as positive as stereotypically assumed. The US participants had the most positive attitude, while participants from Mexico had the most negative attitude. The participants from the online community were more positive towards robots than those not involved. Previous experience in interacting with Aibo also had a positive effect, but owning an Aibo did not improve their attitude.
Keywords: Robot, Attitude, Emotion, Interaction, Social, Culture
1 Introduction
The United Nations (UN), in a recent robotics survey, identified personal service robots as having the highest expected growth rate (United Nations 2005). These robots are envisaged to help the elderly (Hirsch et al. 2000), support humans in the house (Breemen et al. 2005 ; NEC 2001), improve communication between distant partners (Gemperle et al. 2003) and provide research vehicles for the study of human-robot communication (Breazeal 2003 ; Okada 2001).
In the last few years, several robots have even been introduced commercially and they have received widespread media attention. Popular robots (see Figure 1) include Aibo (Sony 1999), Nuvo (ZMP 2005) and Robosapien (WowWee 2005). Robosapien has been sold around 1.5 million times by January 2005 (Intini 2005).
Furthermore, robots have been tested in schools, museums and hospitals. Kanda et al. (2004) tested a child-size interactive humanoid robot (Robovie) at an elementary schools for several weeks. The robot interacted with the children by using speech and gestures in a free-play situation. In one of their studies, the robot motivated the children to learn English by talking in English to them. Wada et al. (2004) conducted a study in which a pet seal robot assisted the elderly in their therapy, and Burgrad et al. (1998) used a robot as a museum guide.Surveys of relevant robots is available (Bartneck and Okada 2001 ; Fong et al. 2003 ).
It appears that different cultures have different levels of exposure to robots through media or through personal experiences. The number of humanoids robots, toy robots, games and TV shows give Japan the leading role in robotic development and culture. However, the typical ‘‘robots will take over the world’’ scenario that is so often used in western culture (Cameron 1984 ; Wachowski and Wachowski 2003 ) is less prevalent in Japan. In the popular Japanese Manga movies good fights evil just like in the Western world, but the role of the good and the evil is not mapped directly to humans as being the good against robots being the evil. In these movies the good and the evil are distributed. You might have a good robot that fights an evil human villain or a good robot fighting bad robots.

Figure 1 Popular robots—Robosapien, Nuvo and Aibo (Click to enlarge)
Kaplan (2004) hypothesized that in the western culture machine analogies are used to explain humans. Once the pump was invented, it served as an analogy to understand the human heart. At the same time, machines challenge human specificity by accomplishing more and more tasks that were formerly solvable only by humans. Machines scratch our ‘‘narcissistic shields’’ as described by Sloterdijk (2002). In contrast, the Japanese culture does not distinguish the natural from the artificial as strictly as does the Western culture. Building human-like machines is a positive activity to discover the natural laws that underlie humanity (Kaplan 2004).
An alternative explanation for the Japanese unconcern for artificial life forms might be traced back to Buddhism and Confucianism. Yamamoto (1983) hypothesized that Confucianism might have had an influence on the positive development of robot culture in Japan. Western culture is strongly influenced by Christianity, which strictly distinguishes objects that do or do not have a soul. The same does not hold true for Buddhism. Spirits may live in each and every object and are part of the whole. Therefore the distance between humans and machines is not so large.
If robots are going to appear more frequently in daily life, an important and relatively unexplored area of research concerns peoples’ attitude towards robots. Cultural and individual differences such as age and previous exposure to robots could play an important role in explaining possible differences in attitude that emerge.
These attitude differences may be related to the psychological construct of computer anxiety. Computer anxiety is considered to be the anxiety or apprehension evoked in individuals when they use computers, do things leading them to computers, or think about the meaning of computers (Raub 1981). It prevents individuals from learning computer literacy. Interestingly, this anxiety includes anxiety towards the social influence of computers, suggesting anxiety towards novel technologies in general. Since robots are novel technological products that incorporate computers, similar types of negative emotions towards robots may prevent individuals from communicating with robots in some situations such as cooperative tasks which involve them. The effects of negative emotions and attitudes towards robots are still largely unknown. With the increasing number of robots available everyday to the public within a variety of different situations, robot anxiety might become as important as computer anxiety is today.
Besides the users’ cultural background, their previous experiences with robots might have a great influence on their attitudes towards robots. People who frequently interact with robots, or even own a robot might feel either more or less concerned about them. On the one hand, robot experience may reduce uncertainty and lead to less anxiety. On the other hand, the user might feel concerned about the rapid progress of robot development in recent years.
Furthermore, users might have different views about what robots truly are. In particular, their anthropomorphism might have influence on how users feel about them. Anthropomorphism refers to an interpretation of what is not human or personal in terms of human or personal characteristics (Merriam Webster Dictionary). In robotics, anthropomorphism is used to describe how human-like a robot is. In the literature (Bartneck and Forlizzi 2004 ; Bartneck and Okada 2001 ; Fong et al. 2003 ), anthropomorphism is frequently treated at human, animal and machine levels. They match the most frequent categories of robots: androids, pet robots and industrial robots.
Based on the above issues, we defined the following research questions:
- Do people from different cultural backgrounds differ in their attitudes towards robots?
- Do people who belong to an online AIBO community have attitudes towards robots different from those that do not belong to such a community?
- Does previous interaction experience with Aibo result in attitudes towards robots different from those of people with no previous experience?
- Do people with different anthropomorphic perception of robots have different attitudes towards robots?
- Do people who own an AIBO have different attitudes towards robots, compared to people that do not own an AIBO?
- Do people who frequently interact with AIBO have an attitude towards robots different from those of people who rarely interacted with AIBO?
2 Method
2.1 Design
An experiment with the following independent variables was conducted: 7 (culture) x 2 (community) x 2 (experience) x 2 (anthropomorphism) x 3 (frequency) x 2 (ownership). In the following text, the italic style is used to mark these conditions. The culture conditions were based on the nationalities of the participants. Seven main nationalities participated and are listed in Table 1. Participants with other nationalities were not considered in the analysis. The two community conditions, Aibo community and no community, were based on two sets of data obtained. The no-community participants received the measure ments in the frameworks of several experiments at universities and institutes (Nomura et al. 2005). They received a printed negative attitude towards robots scale (NARS) questionnaire as well as an online version. The Aibo community participants were approached through postings in several Aibo related online communities, such as http://www.aibo-friends.org. These participants all filled in the online NARS questionnaire.
| No community | Aibo community | Total | |
|---|---|---|---|
| CHN | 20 | 24 | 44 |
| GER | 68 | 41 | 109 |
| JPN | 54 | 81 | 135 |
| MEX | 16 | 5 | 21 |
| NLD | 28 | 13 | 41 |
| UK | 29 | 29 | 58 |
| USA | 22 | 37 | 59 |
| Total | 237 | 230 | 467 |
Table 1 Number of participants across the culture and community conditions
2.2 Participants
A total of 467 participants (169 female, 298 male) from 7 different countries (see Table 1) participated in the study. Of these 230 participants were acquired through contacting Aibo online communities and 237 were acquired from uni versities (see Table 1).
The sample size of the Mexican participants is a bit low and therefore the results of the further analysis concerning the Mexican influence need to be considered with care.
2.3 Measurements
The NARSwas used as the main measurement. The NARS developed by Nomura et al. (2004) is a 14-item self-report inventory, each item is being rated on a 5-point Likert scale, with anchors 1 = strongly disagree and 5 = strongly agree (see Figure 6 in Appendix). NARS measures the degree of humans’ attitudes towards communication robots in daily life. The NARS consists of three sub scales:
- Attitude towards the interaction with robots (interact)
(e.g. I would feel relaxed talking with robots) - Attitude towards social influence of robots (social)
(e.g. I am concerned that robots would have a bad influence on children) - Attitude towards emotions in interaction with robots (emotion)
(e.g. I would feel uneasy if robots really had emotions)
Previous research indicated good reliability and validity of the questionnaire given the Japanese sample (Nomura et al. 2004). The a-coefficient of the first subscale was 0.78, the second subscale was 0.78, and the third subscale was 0.65. These results indicate a good internal consistency.
Test–retest reliability coefficients were 0.71, 0.74, and 0.54, respectively. Confirmatory factor analysis using structure equation modeling showed good indices GFI = 0.900, AGFI = 0.856, and RMSEA = 0.080. And Pearson’s correlation coefficients r between the scores of the subscales and those of STAI-S and STAI-T ranged from -0.035 to 0.286. These relationships were weaker than that between Computer Anxiety and general anxiety as predicted. These results give us sufficient confidence in the reliability and validity of the NARS questionnaire.
The NARS questionnaire was translated from Japanese into all the other six languages used for this study. The translation included several cycles of back-translation and revision.
The no-community participants received the original NARS survey, while the Aibo community participants received an extended version of the NARS survey, which included the following additional questions:
- What do robots remind you of? (humans, animals, machines)
- Did you ever play with Sony’s dog robot AIBO? (yes, no)
- How often do you play with AIBO? (almost every day, several times per week, once per week, once per month, almost never)
- Do you or a member of your family own an AIBO? (yes, no)
The online survey tool used conditional branching. Only if the participants declared that they had played with AIBO before, did they received questions 3 and 4. Since the participants of the first data gathering did not receive the additional question, the experience, anthropomorphism, frequency and ownership conditions were limited to the data from the Aibo community condition.
3 Results
The internal consistency of the questionnaire was analyzed and the resulting Cronbach’s a coefficients give us sufficient trust in the questionnaires overall reliability. The Cronbach’s as for the three subscales were interact (0.791), social (0.655) and emotion (0.603). The scores of the three subscales were calculated as the mean of the corresponding questions as described in (Nomura et al. 2004).
A multivariant analysis of variance (MANOVA) was performed with culture, community and gender as independent variables and interaction, social and emotion as dependent variables. The results are available in Table 2.
| df | Error | F | Significance | ||
| Community | Interact | 1 | 439 | 32.957 | 0.000 |
| Social | 1 | 439 | 46.828 | 0.000 | |
| Emotion | 1 | 439 | 43.155 | 0.000 | |
| Gender | Interact | 1 | 439 | 0.029 | 0.865 |
| Social | 1 | 439 | 5.283 | 0.022 | |
| Emotion | 1 | 439 | 0.292 | 0.589 | |
| Culture | Interact | 6 | 439 | 11.488 | 0.000 |
| Social | 6 | 439 | 3.420 | 0.003 | |
| Emotion | 6 | 439 | 2.608 | 0.017 | |
Table 2 F values and their significance for all conditions
Only one significant difference was revealed for gender on the social subscale of the NARS questionnaire (see Table 2). Female participants were more positive on social than male participants. This influence reappears in all subsequent analyses.
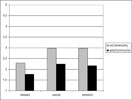
Figure 2 Means for all measurements in the community conditions
Community had a major influence on all three subscales. Members of the Aibo online communities had a significantly more positive attitude towards robots than participants in the no-community condition (see Figure 2). Culture had a significant influence on all measurements. The measurements differed considerably (see Figure 3, Table 3).
| Interact | Social | Emotion | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | SD | Range | Mean | SD | Range | Mean | SD | Range | |
| CHN | 2.170 | 0.660 | 0.660 | 2.827 | 0.759 | 3.200 | 2.598 | 0.971 | 4.000 |
| GER | 2.104 | 0.762 | 3.167 | 2.939 | 0.855 | 3.800 | 2.492 | 0.924 | 3.333 |
| JPN | 1.754 | 0.736 | 4.000 | 2.631 | 0.872 | 4.000 | 2.837 | 0.809 | 4.000 |
| MEX | 3.635 | 1.335 | 4.000 | 3.086 | 1.138 | 4.000 | 2.302 | 0.869 | 2.667 |
| NLD | 2.053 | 0.625 | 2.833 | 2.605 | 0.658 | 3.000 | 2.707 | 0.981 | 3.667 |
| UK | 1.670 | 0.486 | 1.833 | 2.714 | 0.854 | 3.200 | 2.621 | 1.114 | 4.000 |
| USA | 1.489 | 0.478 | 1.667 | 2.319 | 0.791 | 3.200 | 2.768 | 0.983 | 4.000 |
Table 3 Means, standard deviations and ranges of the interact, social and emotion across the seven cultures
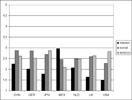
Figure 3 Means for all measurements in the community and culture conditions
Post hoc t tests with Bonferroni corrected a for interact are shown in Table 4. Significant differences are highlighted with the bold typeface. The test for social were only significant for the couples JPN-GER (p = .036), CHN-USA (p = .018) and USA-MEX (p = .002). For emotion only the GER-JPN couple revealed a significant (p = .050) difference. Due to the small sample size of the Mexican participants the significance of effects related to this condition need to be considered carefully.
| CHN | GER | JPN | MEX | NLD | UK | |
| GER | 1.000 | |||||
| JPN | 0.006 | 0.001 | ||||
| MEX | 0.000 | 0.000 | 0.000 | |||
| NLD | 1.000 | 1.000 | 0.226 | 0.000 | ||
| UK | 0.003 | 0.001 | 1.000 | 0.000 | 0.089 | |
| USA | 0.000 | 0.000 | 0.200 | 0.000 | 0.001 | 1.000 |
Table 4 Significance levels of t tests for interact
There is an interaction effect between community and culture for social (F(6,439) = 6,366, p < .001), interact (F(6,439) = 5.119, p < .001) and emotion (F(6,439) = 3.318, p = .003). Table 5 presents the means for the community and culture conditions.
| Measurement | Culture | Aibo community | No-community |
|---|---|---|---|
| Interact | China | 2.22 | 2.13 |
| Germany | 2.71 | 2.93 | |
| Japan | 3.23 | 2.07 | |
| Mexico | 2.25 | 1.85 | |
| Netherlands | 3.25 | 2.43 | |
| UK | 2.49 | 2.50 | |
| USA | 2.04 | 1.57 | |
| Social | China | 3.17 | 2.27 |
| Germany | 3.09 | 2.67 | |
| Japan | 4.27 | 1.60 | |
| Mexico | 3.47 | 1.84 | |
| Netherlands | 2.54 | 1.53 | |
| UK | 2.10 | 1.95 | |
| USA | 2.69 | 2.42 | |
| Emotion | China | 3.01 | 2.05 |
| Germany | 1.75 | 1.59 | |
| Japan | 3.06 | 2.37 | |
| Mexico | 3.02 | 2.22 | |
| Netherlands | 1.45 | 1.51 | |
| UK | 2.40 | 2.27 | |
| USA | 3.38 | 2.41 |
Table 5 Means for all measurements in the culture and community conditions
The second part of the analysis focuses on the data from the 230 participants from the Aibo community condition (see Table 6).
| Not interact | Aibo Interact | Aibo Total | |
|---|---|---|---|
| Machines | 72 | 116 | 188 |
| Animals | 4 | 21 | 25 |
| Humans | 10 | 7 | 17 |
| Total | 86 | 144 | 230 |
Table 6 Number of participants in the second analysis
A MANOVA was performed with experience and anthropomorphism as independent variables, and interact, social and emotion as the dependent variables. Figure 4 present the means of the conditions.
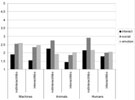
Figure 4 Means for the experience and anthropomorphism conditions
Participants with different experience had significantly different scores on interact and social but not on emotion. Participants with different anthropomorphism had significantly different scores on interact and social (see Table 7). There was no interaction effect between experience and anthropomorphism.
| Condition | Measurements | df | Error | F | Significance |
|---|---|---|---|---|---|
| Experience | Interact | 1 | 224 | 9.379 | 0.002 |
| Social | 1 | 224 | 12.043 | 0.001 | |
| Emotion | 1 | 224 | 0.052 | 0.820 | |
| Anthropomorphism | Interact | 2 | 224 | 1.159 | 0.316 |
| Social | 2 | 224 | 0.198 | 0.820 | |
| Emotion | 2 | 224 | 3.745 | 0.025 |
Table 7 F values and their significances in the experience and anthropomorphism conditions
Participants who had interacted with Aibo were more positive on interact and social. The most negative values on social (2.000 in the machine condition) and interact (1.786 in the human condition) in the Aibo-interact conditions were still below the least negative values on social (2.545 in the machines condition) and interact (1.888 in the machines condition) in the non-interact conditions.
Post hoc t test using Bonferroni corrected a revealed that participants who rated robots as being machine-like were more negative on the social and emotion subscales of the NARS questionnaire (p = .037 and .025) than participants who rated robots as being animal-like.
The third part of the analysis focuses on the 144 participants who previously interacted with Aibo. A MANOVA was conducted with frequency and ownership as independent variables and interact, social and emotion as dependent variables.
Participants who own an Aibo (ownership) had no significantly different scores on interact, social or emotion. Participants with different scores for frequency also had a significant (F(4,134) = 3.642, p = .008) different score on emotion. The more the participants interacted with Aibo, the more positive their attitude towards robots were (see Figure 5). There was no interaction effect be tween frequency and ownership.
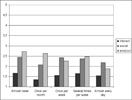
Figure 5 Means in the ownership and frequency
4 Discussion and conclusions
Participants from different cultural background had significantly different attitudes towards robots. In contrast to the popular belief that the Japanese love robots, our results indicate that the Japanese are concerned at the impact that robots might have on society and that they are particularly concerned at the emotional aspects of interacting with robots. A possible explanation could relate to their higher exposure to robots in real life, but particularly through the Japanese media. The Japanese could be more aware of the robots abilities and also their shortcomings.
Participants from the USA were the least negative towards robots, particularly regarding the aspect of interacting with them. A possible reason could be that they are used to technology and at the same time easy going when it comes to talking to new people. Another striking difference can be found when looking at the ratings of the Mexican participants. They were most negative towards robots, in particular towards interacting with them. But this particular result might be compromised through the small sample size of the Mexican participants. Additional research would be necessary to confirm it.
The participants’ involvement in an online Aibo community had a significantly different attitude towards robots than participants not involved. However, the causal relationship is not determined. The participants could be positive about robots because they are involved in the community, or the participants get involved in the community because they are positive about robots. In any case, previous direct interaction experience with Aibo significantly decreases the participants’ negative attitude towards robots. The more they interacted with Aibo, the less negative were the participants towards robots. Actually owning an Aibo did not further influence their attitude.
A possible explanation for the interaction effect between community and culture could be that in the no community condition no specification of the term ‘‘robot’’ was given while it can be assumed that participants’ understanding of a robot in the Aibo community condition would be more coherent. Unfortunately, the anthropomorphism condition is only available in the within the Aibocondition. A more detailed analysis is therefore not possible at this point.
An interesting aspect for a further study would be the possible change in attitude of naı¨ve users when interacting with a robot. The NARS survey would need to be administered before and after the study. Another interesting aspect would be the human-likeness of the robot itself. Do people have a more positive attitude towards androids?
When engineers and designers create our future robots, they should take into account the different attitudes that the people in different cultures have towards robots. A robot that is developed by an American company for the US market might not succeed in Japan or Mexico. Special attention needs to be paid to the interaction between the robot and its users.
4.1 Future work
While this study was able to shed some light on the different attitudes towards robots based on their cultural background, it is difficult to explain why these differences exist. There are certain cultural frameworks available, in particular the work of Hofstede (1991), but it is difficult to relate these works to robots. Furthermore, if the attitude towards robots is directly related to the exposure that people have to them, then the results of our study will be only a snapshot in time. To test this aspect, we should repeat this study once the number of robots in society has been increased substantially.
This study was conducted at universities and through the Internet. This might introduce a bias in the data. People with no computer experience might not have had enough opportunity to participate in this study. It is conceivable that elderly people might have different attitudes towards robots. A future study should include a wider range of participants to ensure a high generalizability.
5 Appendix
![]()
Figure 6 Screenshot of the questionnaire
Acknowledgments
We would like to thank Jodi Forlizzi, Oscar Mayora Ibarra, Hu Jun and Juliane Reichenbach, Kennsuke Kato, Kerstin Dautenhahn and Sarah Woods for their generous help in gathering the data. In addition, we would like to thank Chi Ho Chan, David Cournapeau, Nathalia Romero Herrera, Alice Jager, Roberto Lopez and Machi Takahachi for their efforts in translating the questionnaire. This study was supported by the Ministry of Internal Affairs and Communication, Japan.
References
Bartneck, C., & Forlizzi, J. (2004). A Design-Centred Framework for Social Human-Robot Interaction. Proceedings of the Ro-Man2004, Kurashiki. | DOI: 10.1109/ROMAN.2004.1374827 | DOWNLOAD
Bartneck, C., & Okada, M. (2001). Robotic User Interfaces. Proceedings of the Human and Computer Conference (HC2001), Aizu. | DOWNLOAD
Breazeal C (2003) Designing sociable robots. MIT Press, Cambridge | view at Amazon.com
Breemen AJN v, Yan X, Meerbeek B (2005) iCat: an animated user-interface robot with personality. In: Proceedings of the 4th international conference on autonomous agents and multi agent systems, Utrecht | DOI: 10.1145/1082473.1082823
Burgard W, Cremers AB, Fox D, Hahnel D, Lakemeyer G, Schulz D et al (1998) The interactive museum tour-guide robot. In: Proceedings of the artificial intelligence/innovative applications of artificial intelligence, Madison | view at the Robotics Institute
Cameron J (Writer) (1984) The Terminator [DVD]. In: J. Daly (Producer): MGM | view at Amazon.com
Fong T, Nourbakhsh I, Dautenhahn K (2003) A survey of socially interactive robots. Rob Auton Syst 42:143–166 | DOI: 10.1016/S0921-8890(02)00372-X
Gemperle F, DiSalvo C, Forlizzi J, Yonkers W (2003) The Hug: a new form for communication. In: Proceedings of the designing the user experience (DUX2003), New York | DOI: 10.1145/997078.997103
Hirsch T, Forlizzi J, Hyder E, Goetz J, Stroback J, Kurtz C (2000) The ELDeR project: social and emotional factors in the design of eldercare technologies. In: Proceedings of the conference on universal usability, Arlington | DOI: 10.1145/355460.355476
Hofstede GH (1991) Cultures and organizations: software of the mind. London. McGraw-Hill, New York | view at Amazon.com
Intini J (2005) Robo-sapiens rising: Sony, Honda and others are spending millions to put a robot in your house. http://www.macleans.ca/topstories/science/article.jsp?content=
20050718_109126_109126
Kanda T, Hirano T, Eaton D, Ishiguro H (2004) Interactive robots as social partners and peer tutors for children: a field trial. Human computer interaction. Spec Issues Human Robot Interact 19(1–2):61–84 | DOI 10.1207/s15327051hci1901&2_4
Kaplan F (2004) Who is afraid of the humanoid? Investigating cultural differences in the acceptance of robots. Int J Human Robot 1(3):1–16 | DOI: 10.1142/S0219843604000289
NEC (2001). PaPeRo. from http://www.incx.nec.co.jp/robot/
Nomura T, Kanda T, Suzuki T (2004) Experimental investigationi into influence of negative attitudes toward robots on human-robot interaction. In: Proceedings of the 3rd workshop on social intelligence design (SID2004), Twente
Nomura T, Kanda T, Suzuki T, Kato K (2005) People’s assumptions about robots: investigation of their relationships with attitudes and emotions toward robots. In: Proceedings of the IEEE international workshop on robot and human communication (ROMAN2005), Nashville | DOI: 10.1109/ROMAN.2005.1513768
Okada M (2001) Muu: artificial creatures as an embodied interface. In: Proceedings of the ACM Siggraph 2001, New Orleans
Raub AC (1981) Correlates of computer anxiety in college students. PhD Thesis, University of Pennsylvania
Sloterdijk P (2002) L’Heure du Crime et le Temps de l’Oeuvre d’Art: Calman-Levy | view at Amazon.fr
Sony (1999). Aibo. From http://www.aibo.com
United Nations (2005). World robotics 2005. United Nations Publication, Geneva | view at Amazon.com
Wachowski A, Wachowski L (Writer) (2003) Animatrix | view at Amazon.com
Wada K, Shibata T, Saito T, Tanie K (2004) Effects of robot-assisted activity for elderly people and nurses at a day service center. Proc IEEE 92(11):1780–1788 | DOI: 10.1109/JPROC.2004.835378
WowWee (2005) Robosapien. http://www.wowwee.com/robosapien/robo1/robomain.html
Yamamoto S (1983) Why the Japanese have no allergy towards robots. L’esprit d’aujourd’hui (Gendai no Esupuri), 187:136–143
ZMP (2005) Nuvo. http://www.nuvo.jp/nuvo_home_e.html
This is a the author's version. The original publication is available at www.springerlink.com | last updated February 5, 2008 | All Publications