DOI: 10.1109/ROMAN.2016.7745155 | CITEULIKE: 14249170 | REFERENCE: BibTex, Endnote, RefMan | PDF ![]()
Obaid, M., Sandoval, E. B., Zlotowski, J., Moltchanova, E., & Bartneck, C. (2016). Stop! That is Close Enough. How Body Postures Influence Human-Robot Proximity. Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication pp. 354-361. | DOI: 10.1109/ROMAN.2016.7745155
Stop! That is Close Enough. How Body Postures Influence Human-Robot Proximity
HIT Lab NZ, University of Canterbury
PO Box 4800, 8410 Christchurch
New Zealand
christoph@bartneck.de
School of Humanities Social Sciences,
Jacobs University, Bremen, Germany
Abstract - In this paper we present a study that investigates human-robot interpersonal distances and the influence of pos- ture, either sitting or standing on the interpersonal distances. The study is based on a human approaching a robot and a robot approaching a human, in which the human/robot maintain either a sitting or standing posture while being approached. We collected and analysed data from twenty-two participants and the results revealed that robot posture has a significant impact on the interpersonal distances in human-robot interactions. Previous interactions with a robot, and lower negative attitudes towards robots also impacted interpersonal distances. Although the effects of gender, height and age did not yield significant results, we discuss their influence on the interpersonal distances between humans and robots and how they are of interest for future research. We present design implications for human- robot interaction research and humanoid robot design.
Keywords: proximity, human-robot interaction, hri, posture
I. Introduction
Human-Computer Interaction (HCI) and Human-Robot Interaction (HRI) research shows that robots which behave in socially acceptable ways are more likely to become socially accepted by humans [2][3][4]. Modeling the behaviour of a robot to be acceptable by humans presents a great challenge. Designing robot social behaviours is dependent on a combination of verbal and non-verbal behaviours and expressions that are present when humans interact and communicate with each other. Just as humans regulate their behaviours towards one another, a social robot should be able to do the same thing. A number of researchers have investigated and outlined several behavioural channels necessary for successful human-robot social interaction and discussed their impact on HRI [5][6][7]. The ultimate goal for the HRI research community is to provide a set of guidelines and design implications that allow researchers and designers to build robots that are socially acceptable to humans.
Researchers for human-human communications have identified several factors that impact social interaction and proxemic behaviours; these include factors such as language, gender, appearance and non-verbal factors such as facial expressions, paralinguistics, body language/posture, proxemics, haptics, and gaze [8][9][10][11][12][13][14][15]. While there are several communication channels and behaviours to investigate, social spaces and understanding of how humans spatially distance themselves from robots (or human-robot proxemics) has attracted the attention of several HRI researchers such as [16][17][18]; similarly, interpersonal spaces’ research has attracted the attention of human-agent interaction researchers such as the work by Cafaro et al. [19]. Previous contributions illustrate the importance of the robot proxemic behaviours when designed to interact with humans. This implies that designing robots that are aware of their social space increases their functionality, social acceptance, and the level of intimacy that can be achieved between humans and robots during interaction [20].
HRI researchers generally conduct studies where the user and/or the robot are in standing [18][21] or sitting [20][22] postures, while the robot or human is approaching. However, studying the acceptable distance between humans and robots depends not only on whether the human or robot is approaching but also on whether the user is standing or sitting. There may be a possibility of an interaction effect between the posture of the user and their behaviour, either approaching or being approached. These factors have motivated the design of a novel study to investigate how human-robot postures influence social distances and impact users’ responses. We contribute to the field of HRI the following:
- An investigation on the influence of the human-robot body posture and proximity, in particular:
- The posture of the human
- The posture of the robot
- Exploring the impact of the participants’ gender, height, attitude towards robots, and anthropomorphism tendency.
- Offer several design implications for improved human-robot interaction and study design.
The study investigates human-robot proxemics from the perspective of human communication and interaction literature, in particular the proxemic definition by Hall [8] and the Equilibrium model by Argyle and Dean [9].
II. Related Work
A. Human-human proxemics
In the field of human-human communication and interaction, researchers have investigated human-human proxemics in detail and defined several theories and models of human behaviours. The term social distance was discussed early on by Park [23] who defined this concept through grades and degrees of intimacy, while Bogardus [24] investigated how and why individuals from different cultural backgrounds maintain social distances. Furthermore, Hall [8] coined the term Proxemics and presented a well-known theory for interpersonal distances between individuals based on the definition of four space zones that surround an individual. These zones include: (1) the intimate distance zone (up to 46 cm), (2) the personal distance zone (46 cm to 120cm), (3) the social distance zone (120cm to 360cm), and (4) the public distance zone (over 360cm). In his definition, Hall describes several factors that have an effect on the interpersonal distances in human communication including eight dimensions of behavioural factors and three space categories as described in Table I. In this paper, we use Hall’s definitions to study the human-robot proxemics. Specifically we investigate the individuals’ and robots postural identifiers (sitting and standing) and allow the participant to maintain the “informal space”, while all other defined factors are kept constant.
| Space Categories | |
| Name | Description |
| Fixed feature space | The place and its features, such as walls and the room structure |
| Semi-fixed feature space | Mobile objects, such as furniture around the individual |
| Informal space | The space around the individual maintained around others within the space |
| Proxemic Behavioural Dimensions | |
| Name | Description |
| Postural-gender identifiers | The individual’s gender and posture (sitting, standing, or prone) |
| Sociofugal-sociopetal axis | The shoulder orientation of the individuals during communication |
| Kinesthetic factor | The distances between individuals that allow for body contact and touching |
| Touch code | The way of touching between individuals (e.g. caressing) |
| Visual code | Eye contact between individuals |
| Voice loudness | The individual’s vocal loudness |
| Thermal code | The individual’s body heat perceived by others |
| Olfaction code | The perceived body odours |
Table I. Hall’s Proxemic Dimensions and Space Categories [1], including eight dimensions of behavioural factors and three space categories. We investigate the individual’s and robot’s postural identifiers (sitting and standing) and allow the participant to maintain the “informal space", while other factors are kept constant
Argyle and Dean [9] define an equilibrium model for interpersonal distances between two individuals, which states “If one of the components of intimacy is changed, one or more of the others will shift in the reverse direction in order to maintain equilibrium”. They tested the effect of eye gaze on physical proximity and found that the two behaviours conform to the equilibrium model, in which an increase/decrease in an individuals eye contact will result in an adaptation by the other individual and an inverse increase/decrease of physical proximity to achieve equilibrium. Argyle and Dean [9] formulate the models as follows:
Although this model only tested physical proximity as a function of eye gaze, it can still be applied to other functions of physical proximity such as posture. Hartnett et al. [25] conducted a study to determine the effects of height, posture, and gender on personal space. They recruited male and female subjects and asked them to approach a tall person and a short person in two conditions: standing and sitting. The subjects were asked to stop approaching the person when they felt “uncomfortable”. The results of this study revealed that the height of the subject, their posture, and gender had a significantimpact on the interpersonal distance. Hartnett et al. [25] addressed the fact that their subjects perceived less threat in the sitting versus standing condition. Though, Hartnett et al. did not refer to the model of Argyle and Dean [9], it is apparent that the subjects adopted the equilibrium model in Equation 1 to achieve the comfortable interpersonal distance, indicating seated posture and reduced height as most comfortable. In this paper, we elaborate on the study by Hartnett et al. [25] and adopt the equilibrium model [9] to study posture and physical proximity in HRI.
B. Human-robot proxemics
The study of human-robot interpersonal distances and proxemic behaviour has been addressed by tackling several behavioural factors that may affect the human-robot proxemics [20][21][26]. Walters et al. [20] presented two exploratory studies between humans and a mechanical robot. The first study was based on testing participants approaching and being approached by a mechanical robot. They discovered that participants did not conform to Hall’s social zones [8], while it was noted that participants did not treat the robot as if it were human. The second study was based on the robot fetching an object and passing it to a seated participant while approaching from different directions. The results revealed that participants disliked the frontal approach from a mechanical robot. Złotowski et al. [27] describe a study to determine the impact on users when being approached by a robot from different trajectories. Their results revealed that individuals in motion (walking) prefer to be approached by a robot from the front-left or front-right. If individuals are only standing then the robot may approach from all directions (front-left, front-right or front-center). Satake et al. [28] presented a model for robot approaching behaviours in which the robot initiated interactions; planning an approach path and nonverbally signaling approach to users was effective. Mumm and Mutlu [17] reported a study on human-robot proxemics based on social scientific theories, including[9], to explain how individuals distance themselves from robots; they indicate that the greatest indicator of distancing was a dislike for the robot. Takayama and Pantofaru [18] presented work on the influence of several factors in different human robot approaching scenarios. Their study was conducted with a mechanical robot in three situations: a robot approaching users autonomously, a teleoperated robot approaching users, and users approaching the robot. Results indicated that users with pets and/or prior experience with robots tended to leave a shorter distance between themselves and the robot. In addition, personality traits of neuroticism and having a negative attitude towards robots increased the human-robot distance. The head orientation of the robot towards the user resulted in an increased distance for female users and a decreased distance for male users.
Most research in this area address influence factors based on either a human approaching a robot or a robot approaching a human. In both cases, the approached individual is either standing or sitting. To our knowledge there are no current studies that take the posture of the human or the robot (either standing or sitting) and the role of the user/robot (approaching or being approached) into consideration concurrently; we address this aspect. In addition, we explore the impact of gender on interpersonal distance when the user is approaching or being approached by a robot in standing and sitting postures.
III. Hypotheses
Based on the Argyle and Dean [9] equilibrium model and the study by Hartnett et al. [25] we hypothesize (H1) that the human participants will maintain their personal comfort level by requiring different human-robot interpersonal distances based on the posture of the robot (standing or sitting) (H1a) or the posture of the human (standing or sitting) (H1b).
Hartnett et al. [25] revealed that gender and height had a significant effect on interpersonal distance, in which the height had a stronger impact for female subjects than for male subjects. In addition, Takayama and Pantofaru [18] revealed that the postural factor of head orientation significantly influenced the distances between female and male subjects and a robot. Therefore for our hypothesis (H2) we not only expect the interpersonal distance to depend on whether the robot is sitting or standing or the human is sitting or standing, but that the resulting distance is dependent on gender. We expect the impact of the agents posture to be stronger among female participants
Previous studies have indicated that people are comfortable with shorter interaction distances when they interact with robots (e.g. [20]) in comparison to humans (e.g. [8]). In sum, the robots were treated differently than humans. However, it is possible that these results are different for people who perceive robots as more human-like. People who perceive a robot as more human-like may desire more distance in the comfortable interaction space, similar to human interaction, than people who treat it as an object. Thus, we hypothesize (H3) that humans with a higher tendency to anthropomorphize non-human agents will prefer a greater interaction distance with the robot than people with a low general tendency to anthropomorphize; based on previous research. Allowed interpersonal distances may also be linked to less negative attitudes and less anxiety towards robots; these may result in smaller interpersonal distances. The use of subjective questionnaires on attitudes, perceptions, and feelings towards robots will help answer H3.
IV. Study Method
Our study was a 2x2 within subjects design. The role of the human as active (approaching) or passive (being approached) and the posture (standing or sitting) of the agent (human or robot) being approached were the independent variables. The agent being approached could be either the human or the robot. The approaching agent was always in the standing position in order to walk. Thus, our design has four conditions (described in Table II) that show the tasks for each participant. Figure 1 illustrates the setup for each of the four study conditions.
| Agent's Role | |||
|---|---|---|---|
| Sitting | Standing | ||
| Human's Role | Active | (a) Human approaching, robot sitting | (b) Human approaching, robot standing |
| Passive | (c) Robot approaching, human sitting | (d) Robot approaching, human standing | |
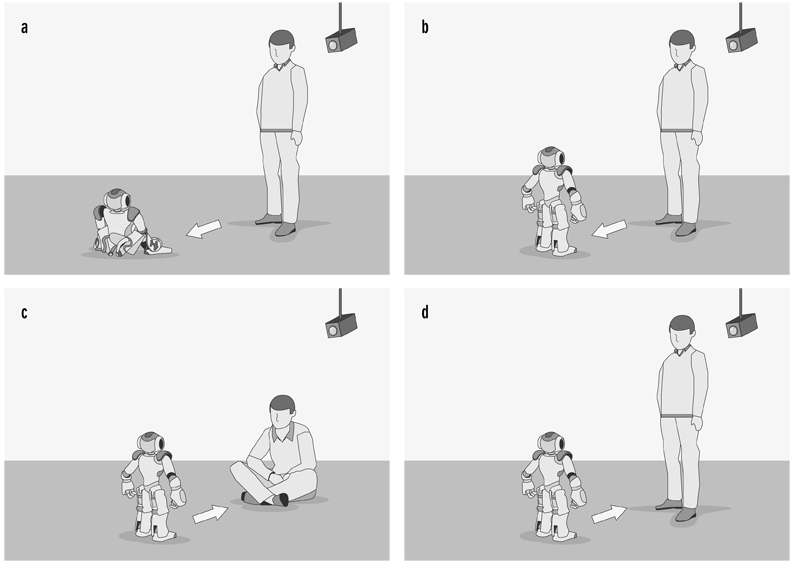
Fig. 1. An illustration of the study setup with a participant, a robot, and cameras for the Wizard-of-Oz. The four conditions are: (a) human approachinga sitting robot, (b) human approaching a standing robot, (c) a robot approaching a sitting human, and (d) a robot approaching a standing human.
A. Apparatus and Procedure
The study was arranged in a room, 4x6.5 meters, which was equipped with one robot and two cameras that fed back to an extended Wizard-of-Oz control room. The Wizard-of-Oz cameras were only used for operations and observation; however, we did not record the participant. The size of the room was chosen to allow us have enough space that can match with the distances proposed by Hall [8].
For our study, we used a humanoid robot from Aldebaran Robotics, named Nao. The robot was programmed to be tele-operated using Choreographe (the Aldebaran’s graphic suite for robot-programming). At the beginning of the study the gait of the robot started and then stopped when the participant said ”Stop”; all controlled by the Wizard. The program had an insignificant delay of less than one second after the operator heard the stop instruction. Although Nao does not have nonverbal facial expressions, it does have idle movements making it appear active in the scenario; In general, Nao’s behaviours were consistent throughout the study sessions, for example, gaze was always frontal towards the participant. The robot has a height of 58cm and the LED lights indicate when it is switched on. We purposefully chose this robot to look at interaction from a different robotics perspective due to its size and popularity within the HRI research community, for example[29] [30]. The robot did not provide any spoken commands throughout the study and the walking speed of the robot was kept constant at 16cm∕s.
The study began with a researcher explaining the study to the participant and asking them to read and sign a consent form. If signed, the participant was asked to fill out a demographics survey and three standardized questionnaires: Negative Attitude towards Robots Scale (NARS) [31][32], Robot Anxiety Scale (RAS-S2) [33]and the Individual Differences in Anthropomorphism (IDAQ) [34]. These questionnaires, commonly used in HRI research, were chosen to help answer H3. Thereafter the participant had an introduction to the robot Nao and its movements to allow them to be familiar with it and to try and avoid any novelty effect. Then the participant was positioned in a marked location in the experimental room facing the humanoid robot (Nao) that was placed 1.7m away (this distance falls into the social distance zone according to Hall [8]). Participants then carried out the four conditions described in Table ??. The four conditions were presented to each participant in a counter-balanced order (Latin Square order) to ensure the results were not affected by the order of conditions. Each condition was carried out while the participant was alone in the room with the robot. In tasks (a) and (b), of Table ??, and after the participant had approached the robot, they marked their position by placing a small marker between their feet to allow for measuring the distance to the robot. At the start of tasks (c) and (d), of Table ??, the participant asked the robot to approach by saying “Nao come here” and when the participant felt that the robot reached a comfortable distance, the participant would say “Stop”. For condition (c), the user was asked to be in a sitting posture with crossed legs. Upon completion, the participant stepped outside of the room to fill out the RAS-S2 questionnaire. Meanwhile, the researcher stepped into the room to measure the distances (in cm) with a tape measure. We ensured that participants did not see the researcher measuring the distances, to eliminate any bias.
B. Participants
A total of 22 individuals participated in the study (8 female); age range from 19 to 56 years with a mean age of 28.6 (SD=10.6). The average height was 175.5cm (SD=11.6); females had an average of 164cm (SD=7.5) and males had an average of 181.9cm (SD=7.4). Participants were all New Zealand born and were recruited from around the University of Canterbury campus. They comprised staff, graduate and undergraduate students from several faculties.
In the presented work, the cultural background of our participants was consistent to control for it, as we know from literature that culture does have an impact on interpersonal distances in HRI [35, 36]; we leave further cross-cultural investigations for future studies.
C. Measurements
The objective measure was the distance between the robot and the human. This distance was measured by the researcher using a measuring tape (cm). The fixed agent (robot or human) stood at a marked position “x”. When the robot was approaching the user, the measurement was taken from the tip of the robot’s right foot to a marked “x” position where the participant was standing/sitting. When the user was approaching the robot, the measurement was taken from the marker (placed by the user between their feet) to the marked position “x” where the robot was sitting/standing. This allowed for a consistent way of measuring distances.
Subjective measures were score from a set of questionnaires. We first asked participants several demographic questions that allowed us to analyse the relationships between age/gender/height and the human-robot proxemic distances. The first questionnaire was the commonly used NARS questionnaire to generally assess the negative attitudes of the participants towards robots (obtained from the research by Tsui et al. [31] whose work is based on [32]). NARS is a Likert-scale questionnaire that is developed to assess the users attitude towards robots. A higher NARS score means a more negative attitude toward robots. Each question of the NARS relates to one of three following sub-scales: Negative Attitudes toward (S1) Situations and Interactions with Robots, (S2) Social Influence of Robots, and (S3) Emotions in Interaction with Robots. In the context of this paper, we assess if a negative attitude towards robots have an influence on the interpersonal distance when approaching or being approached by a robot in sitting/standing postures.
Using the Robot Anxiety Scale (RAS) [33], we assessed participants anxiety towards the behavioural characteristics of the robot (RAS-2), also to understand how levels of anxiety impact interpersonal distances. The set of questions was asked five times; a pre-study set and four post-task sets. The last questionnaire, IDAQ, measures individual differences in anthropomorphism [34]; where it investigates whether participants who anthropomorphize non-human objects would allow interpersonal distances closer to the robot. In the analyses we have used the questions referring to IDAQ’s anthropomorphism subscale.
D. Statistical Methods
To investigate if the distance depended on the type of interaction, we used a repeated measures analysis of variance with covariates (ANCOVA). ANCOVA allows to adjust for confounders such as the order of the experiments, IDAQ and NARS scores, and demographic factors such as gender and age. All analyses were implemented in R [37] using the mixed-effects modelling packages lme4 [38] and lmerTest [39]. Normality and homoscedasticity of residuals and random effects were checked and found to be satisfactory.
The RAS responses were analysed to see whether order or condition had an effect on attitude to robots. The 4-item pre-study questionnaire was conducted before the experiment (at the baseline) and after each of the four conditions (post-task).
V. Results
In the first stage of the analyses, we looked at all the factors that might affect the comfortable interpersonal distance between the human and the robot. The mean observed distances are shown in Figure 1. For the conditions, where the human was the active participant, the distance left when the robot was sitting was on average 35.1 cm whereas the distance left when the robot was standing was on average 50.0 cm. The posture of the robot was thus found to have a statistically significant effect on the remaining distance (β = 14.9; 95% CI [5.2,24.7]; p = 0.004) [H1a]. The result did not change after adjusting for height and gender as well as for IDAQ, NARS and previous interaction. However, participants who have had previous experience with robots tended to leave on average shorter distance (β = 32.2, 95% CI[4.1,60.3]; p = 0.028) as did people who scored higher on the emotional sub-scale of the NARS (β = 25.84, 95% CI [10.3,41.4]; p = 0.003); NARS results shown in Figure 2. Neither IDAQ score, nor the interaction- and social- subscales of the NARS score had a statistically significant effect on the resulting distance [H3].
We also found that women tended to leave on average 39.34 cm less between themselves and the robot than men did (95% CI: [-2.5,81.2]), but that difference was not statistically significant [H2]. This difference between genders cannot be due to height since height alone has been found to have no statistically significant effect on the distance.
When passive, the standing human participants left on average 10.2cm longer distances than when sitting (95% CI:[-1.6,24.7]), but the difference was not statistically significant [H1b]. The result did not change after adjusting for height and gender as well as for IDAQ, NARS and previous interaction. There was no statistically significant difference between men and women [H2b].
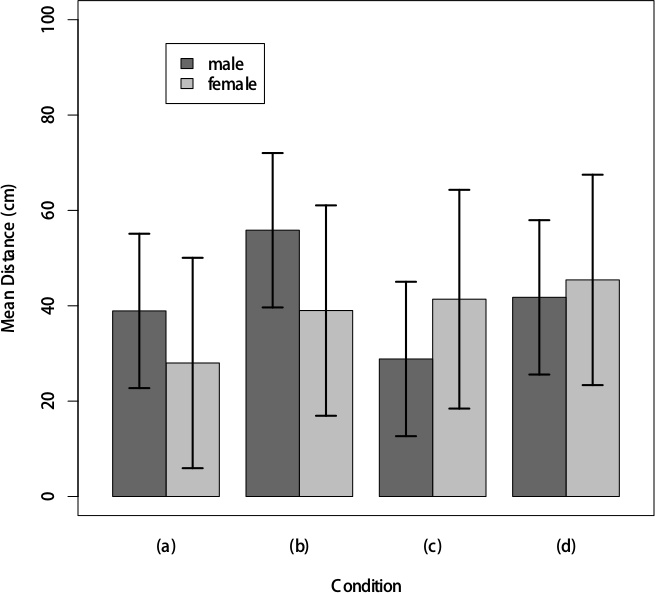
Fig. 2. Mean observed distance by condition and gender of the participants and the 95% CI adjusted for repeated measures. (a) Robot Sitting, human Approaching, (b) Robot Standing, human approaching, (c) human sitting, robot approaching, (d) human standing, robot approaching.
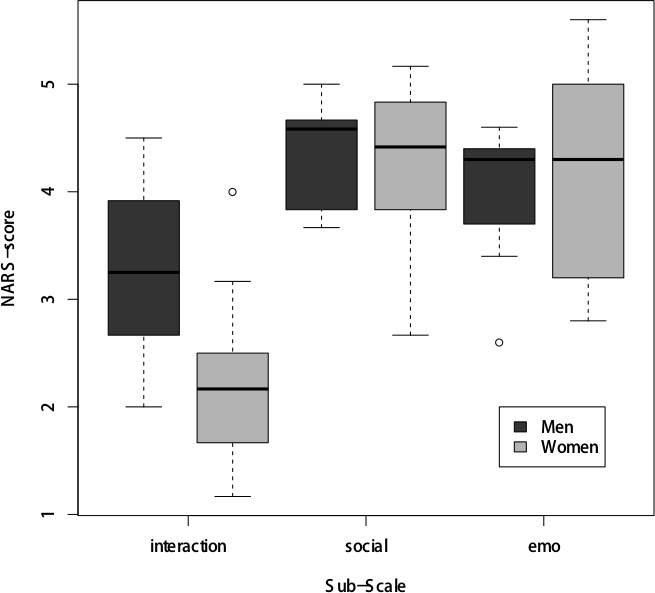
Fig. 3. Negative Attitude Towards Robots measured using the NARSquestionnaire. Boxplots of each of the 3 sub-scales(interaction, social andemotion) are presented separately for males and females. Higher values ofinteraction and social subscales mean a more negative attitude towards therobots, while emotion is inverse.
As previous interactions with robots were statistically associated with shorter interpersonal distances, we analysed whether the subsequent interactions would lead to a similar pattern and the distance would decrease further. Using a Chi-squared test, we found that the order of the experiment had a statistically significant effect on the outcome (?2(3) = 10.65,p = 0.01). Consequent interactions apparently made people more comfortable with robots, as the resulting distance between the robot and the human tended to shorten as shown in Figure 4.
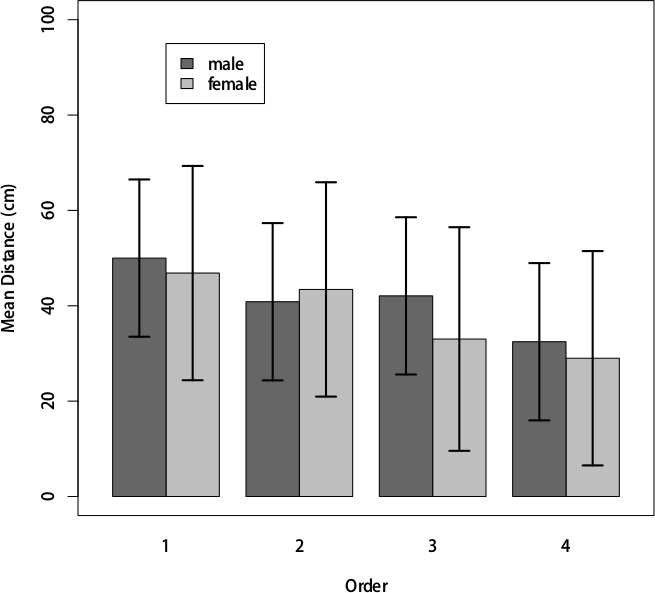
Fig. 4. Mean observed distance by order of the experiment and gender of the participants and the 95% CI adjusted for repeated measures.
In general, each additional year of age was found to associate with an average decrease of 0.6 cm in the resulting distance (95% CI: [-0.4,1.7]). Furthermore, each additional cm of height was found to associate with an average 0.8 cm shorter resulting distance (95% CI: [-1.0,2.5]). Although not statistically significant, these trends may be of practical importance when designing a robot.
In the last part of the analyses we have looked at how participants’ anxiety towards the robots was affected throughout the study. We have analysed each RAS question separately. The estimated probabilities of improved/ unchanged/ deteriorated anxiety towards robots showed no statistically significant effect of either order or condition for any of the four RAS questions.
VI. Discussion
We have presented a study to investigate the influence of body posture on the human-robot interpersonal distances. Our results support hypothesis H1. Distances were significantly impacted by the posture of the robot (H1a) but not by the posture of the human (H1b). The significant results linked to robot posture can be explained by the human adopting the equilibrium model [9] where the individual prefers to have the robot stay further away when they are standing and closer when they are sitting. Although the Nao is a small robot, a sitting posture is much less threatening, regardless of size, than a standing posture as the robot is in a more passive stance, and is further away. The cause of this may be underlying factors, such as the need for the user to feel safe and their perceived locus of control. Clearly when the human is active and moving, they are in control of facets related to closeness and boundaries. When the robot is approaching the human, there is a tendency to leave a larger interpersonal distance. Although the participant is still in control, personal uncertainty may be stronger, including questioning whether the robot will obey their commands, and how much time passes between the command and the robot stopping its approach. Participants who had previously interacted with a robot also tended to leave shorter interpersonal distances. This indicates that as participants feel more comfortable with the robot, they may allow for closer interaction. This is likely linked to a better ability to predict the robots behaviours due to prior interaction, thereby increasing interpersonal comfort. This has design implications for future studies within the field of HRI.
Our results are not significant for hypothesis H2, however they present an interesting point of discussion for H2. Our results indicate that female participants actually may allow for closer interpersonal distances with robots, and this effect, although only a trend is not linked to participant height. It may be reasonable to assume that a small humanoid robot (the Nao)is a very nonthreatening robot. The Nao is a child-like robot that has a toy-like embodiment. Females typically respond stronger to cherished objects (for emotional and relational reasons), including dolls, toys, stuffed animals; since the Nao resembles a toy, they may therefore feel more comfortable with closeness to an object that resembles such an item [40]. It would be interesting to further study this effect with more female participants and different robot embodiments to explore these results. Our lack of significance is likely due to our small female sample size; which we would like to address in our future work.
We did not find support for hypothesis H3 but instead found that distances were perhaps not linked to anthropomorphism but rather to subjective feelings towards the robot. IDAQ scores did not have significant effects on interpersonal distance, nor did the NARS interaction and social sub-scales. However, the emotions sub-scale of the NARS was correlated to a decrease in interpersonal distance. The emotion sub-scale of the NARS explores the participant’s subjective feelings towards robots, and how they would be impacted by interaction with an emotional robot. It can be assumed that if a human believes that a robot is capable of either becoming emotional, expressing emotion and/or understanding it, the robot becomes more relatable and also more “human”. It may also show that people with more positive attitudes towards robots being programmed with human emotional qualities, are automatically more accepting of a robot being close. This may explain why shorter interpersonal distances are found with participants who have less negative attitudes towards emotional robots. This is of interest for future research.
A. Design Implications
Our results reveal the importance of considering several factors when designing proxemic behaviours of humanoid robots and humans. The posture of the robot and of the human is of importance to how physical distancing is perceived and responded to. Robots need to be designed to know if their user is sitting or standing, and allow for their social distance to be adopted accordingly. In addition, we did not program the Nao with multiple non-verbal behaviors, other than its’ idle movements. The addition of more non-verbal behaviors would likely increase the effects found in this study. This would be a future research question of interest: to what extent non-verbal behaviors impact comfort levels and personal distance?
In addition, gender, age and height factors have an impact on interpersonal distance. Females appear to allow robots into their personal space at a lesser distance than males. In conducting research with females, the embodiment of the robot may moderate this effect. This would be of interest for future study designs. Are females allowing robots closer because of their greater emotional relationship and experience with cherished objects as discussed, or is it based on the Nao robot being particularly child-like and nonthreatening? When exploring male interaction with robots, it will also be of interest to explore what types of designs and embodiments allow for closer interpersonal distances.
In addition, across all conditions we found that age and height were associated with shorter interpersonal distances. Greater personal height may have allowed for less interpersonal distance because the Nao robot is so small. The height of the participant creates more or less distance between them and the robot. It therefore may be the case that the more distance in cm’s between robot and user results in more closeness; perceived threat may be less. The age of the participants may be of interest for future research to assess why this factor impacts interpersonal distances. This also may have design implications for research linked therapy or assistance robots that work with older adult populations.
Finally, we are aware that previous experience with a robot is linked to allowing more interpersonal closeness with a robot. This implies that results of longitudinal studies that explore interaction with robots, may offer more interesting and in-depth results that can be correlated to perceived and allowed robot closeness. In designing HRI studies, it may be useful to have a practice phase, in which participants are allowed to interact with the robot, particularly if the research questions relate to closeness or emotional responses.
VII. Conclusion and future work
We investigated the influence of standing and sitting postures on human-robot proxemics. In this study, we recruited 22 participants to evaluate the postural factors in human-robot proxemic behaviours. The study was designed across four conditions (within-subject) that gave the user an active (approaching) and passive (being approached) role by a robot, in which the human or robot were standing or sitting during the approach. The results revealed that humans allow shorter interpersonal distances when a robot is sitting, or is in a more passive position, and leave more space when being approached while standing. Previous robot experience, and less negative results on the emotional sub-scale of the NARS resulted in shorter interpersonal distances. Although not significant, female participants left less interpersonal space between them and the robot in all conditions. Although we used a small humanoid robot, the Nao, 58cm tall, the height of participants did not impact social distances.
It is clear that this study also has its limitations that impact results and offer opportunities for future research. Limitations include small participant numbers, and a lack of female participants for results to be generalizable. Making gender-based conclusions are subject to further studies with a larger female population. Finally using a Nao robot affects results; its limited height and child-like expression likely impact the results and closeness between human and robot. We propose that future work explores interpersonal distances using various embodiments, and exploring how these may be moderated by gender, age, height and previous robot interaction. Future work will consider more non-verbal behaviours between robots and humans and their effect, combined with the robot’s posture, on interpersonal distances. Since we only address posture and distance we cannot know how these will be affected by other communicative signals. Finally it will be of interest to observe and collect measurements in a non-laboratory human-robot interaction scenario, which may indeed reveal several other factors and findings, important for interpersonal distances in HRI.
References
- M. S. Thirumalai, “Silent talk : Nonverbal communication.” http://www.ciil-ebooks.net/html/silent/ch2.htm. Accessed: 1-6-2013.
- B. Reeves and C. Nass, The media equation: how people treat computers, television, and new media like real people and places. New York, NY, USA: Cambridge University Press, 1996.
- K. Dautenhahn, S. Woods, C. Kaouri, M. Walters, K. L. Koay, and I. Werry, “What is a robot companion - friend, assistant or butler?,” in Processings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2005)., pp. 1192–1197, 2005.
- S. Woods, K. Dautenhahn, C. Kaouri, R. te Boekhorst, K. L. Koay, and M. L. Walters, “Are robots like people? relationships between participant and robot personality traits in human–robot interaction studies,” in Interaction Studies, vol. 8, pp. 281—305, John Benjamins Publishing Company, 2007.
- T. Fong, I. Nourbakhsh, and K. Dautenhahn, “A survey of socially interactive robots,” Robotics and Autonomous Systems, vol. 42, no. 4-3, pp. 143–166, 2003.
- M. A. Goodrich and A. C. Schultz, “Human-robot interaction: a survey,” Foundations and Trends in Human-Computer Interaction, vol. 1, pp. 203–275, Jan. 2007.
- J. Young, Exploring Social Interaction Between Robots and People. PhD thesis, Universit of Calgary, August 2010.
- E. T. Hall, The Hidden Dimension. Doubleday, 1966.
- M. Argyle and J. Dean, “Eye-contact, distance and affiliation,” Sociometry, vol. 28, no. 3, pp. 289–304, 1965.
- K. Kaplan, “Structure and process in interpersonal “distancing”,” Environmental psychology and nonverbal behavior, vol. 1, no. 2, pp. 104–121, 1977.
- M. L. Patterson, “An arousal model of interpersonal intimacy.,” Psychological Review, vol. 83, no. 3, pp. 235–245, 1976.
- L. A. Hayduk, “The shape of personal space: An experimental investigation,” Canadian Journal of Behavioural Science/Revue canadienne des sciences du comportement, vol. 13, no. 1, pp. 87–93, 1981.
- J. C. Baxter, “Interpersonal spacing in natural settings,” Sociometry, vol. 33, no. 4, pp. 444–456, 1970.
- J. K. BURGOON and S. B. JONES, “Toward a theory of personal space expectations and their violations,” Human Communication Research, vol. 2, no. 2, pp. 131–146, 1976.
- J. K. Burgoon, “Relational message interpretations of touch, conversational distance, and posture,” Journal of Nonverbal Behavior, vol. 15, no. 4, pp. 233–259, 1991.
- M. Walters, M. Oskoei, D. Syrdal, and K. Dautenhahn, “A long-term human-robot proxemic study,” in Proceedings of the 20th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2011), pp. 137–142, July 2011.
- J. Mumm and B. Mutlu, “Human-robot proxemics: physical and psychological distancing in human-robot interaction,” in Proceedings of the 6th international conference on Human-robot interaction, HRI ’11, (New York, NY, USA), pp. 331–338, ACM, 2011.
- L. Takayama and C. Pantofaru, “Influences on proxemic behaviors in human-robot interaction,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009., pp. 5495–5502, 2009.
- A. Cafaro, H. H. Vilhjálmsson, T. Bickmore, D. Heylen, K. R. Jóhannsdóttir, and G. S. Valgarsson, “First impressions: Users’ judgments of virtual agents’ personality and interpersonal attitude in first encounters,” in Proceedings of the 12th International Conference Intelligent Virtual Agents, (Berlin, Heidelberg), pp. 67–80, Springer Berlin Heidelberg, 2012.
- M. L. Walters, K. Dautenhahn, S. N. Woods, K. L. Koay, R. Te Boekhorst, and D. Lee, “Exploratory studies on social spaces between humans and a mechanical-looking robot,” Connection Science, vol. 18, no. 4, pp. 429–439, 2006.
- M. Walters, D. Syrdal, K. Koay, K. Dautenhahn, and R. te Boekhorst, “Human approach distances to a mechanical-looking robot with different robot voice styles,” in Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2008., pp. 707–712, 2008.
- K. Dautenhahn, M. Walters, S. Woods, K. L. Koay, C. L. Nehaniv, A. Sisbot, R. Alami, and T. Siméon, “How may I serve you?: a robot companion approaching a seated person in a helping context,” in Proceedings of the 1st ACM SIGCHI/SIGART conference on Human-robot interaction, HRI ’06, (New York, NY, USA), pp. 172–179, ACM, 2006.
- R. E. Park, “The concept of social distance as applied to the study of racial attitudes and racial relations,” Journal of Applied Sociology, vol. 8, pp. 339–344, 1924.
- E. S. Bogardus, “Social distance and its origin,” Journal of Applied Sociology, vol. 9, pp. 216–225, 1925.
- J. J. Hartnett, K. G. Bailey, and C. S. Hartley, “Body height, position, and sex as determinants of personal space,” The Journal of Psychology, vol. 87, no. 1, pp. 129–136, 1974.
- M. L. Walters, K. Dautenhahn, R. te Boekhorst, K. L. Koay, D. S. Syrdal, and C. L. Nehaniv, “An empirical framework for human-robot proxemics,” in Proceedings of the New Frontiers in Human-Robot Interaction : symposium at the AISB09 convention, pp. 144–149, 2009.
- J. A. Złotowski, A. Weiss, and M. Tscheligi, “Navigating in public space: Participants’ evaluation of a robot’s approach behavior,” in Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction, HRI ’12, (New York, NY, USA), pp. 283–284, ACM, 2012.
- S. Satake, T. Kanda, D. F. Glas, M. Imai, H. Ishiguro, and N. Hagita, “How to approach humans?: strategies for social robots to initiate interaction,” in Proceedings of the 4th ACM/IEEE international conference on Human robot interaction, HRI ’09, (New York, NY, USA), pp. 109–116, ACM, 2009.
- V. Nitsch and T. Glassen, “Investigating the effects of robot behavior and attitude towards technology on social human-robot interactions,” in Proceedings of the 24th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2015, pp. 535–540, Aug 2015.
- S. Serholt, C. Basedow, W. Barendregt, and M. Obaid, “Comparing a humanoid tutor to a human tutor delivering an instructional task to children,” in Proceedings of the 14th IEEE-RAS International Conference on Humanoid Robots, Humanoids 2014, pp. 1134–1141, Nov 2014.
- K. M. Tsui, M. Desai, H. A. Yanco, H. Cramer, and N. Kemper, “Using the ”negative attitude toward robots scale” with telepresence robots,” in Proceedings of the 10th Performance Metrics for Intelligent Systems Workshop, PerMIS ’10, (New York, NY, USA), pp. 243–250, ACM, 2010.
- T. Nomura, T. Kanda, and T. Suzuki, “Experimental investigation into influence of negative attitudes toward robots on human-robot interaction,” AI & SOCIETY, vol. 20, no. 2, pp. 138–150, 2006.
- T. Nomura, T. Suzuki, T. Kanda, and K. Kato, “Measurement of anxiety toward robots,” in Proceedings of the 15th IEEE International Symposium on Robot and Human Interactive Communication, ROMAN 2006., pp. 372–377, 2006.
- A. Waytz, J. Cacioppo, and N. Epley, “Who sees human? the stability and importance of individual differences in anthropomorphism,” Perspectives on Psychological Science, vol. 5, no. 3, pp. 219–232, 2010.
- N. M. Sussman and H. M. Rosenfeld, “Influence of culture, language, and sex on conversational distance.,” Journal of Personality and Social Psychology, vol. 42, no. 1, p. 66, 1982.
- G. Eresha, M. Haring, B. Endrass, E. Andre, and M. Obaid, “Investigating the influence of culture on proxemic behaviors for humanoid robots,” in RO-MAN, 2013 IEEE, pp. 430–435, IEEE, 2013.
- R Core Team, R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna, Austria, 2013.
- D. Bates, M. Maechler, and B. Bolker, lme4: Linear mixed-effects models using S4 classes, 2011. R package version 0.999375-42.
- A. Kuznetsova, P. Bruun Brockhoff, and R. Haubo Bojesen Christensen, lmerTest: Tests for random and fixed effects for linear mixed effect models (lmer objects of lme4 package)., 2014. R package version 2.0-11.
- S. Kleinc and S. M. Baker, “An integrative review of material possession attachment,” Academy or Marketing Science Review, vol. 1, pp. 1–29, 2004.
This is a pre-print version | last updated January 10, 2017 | All Publications