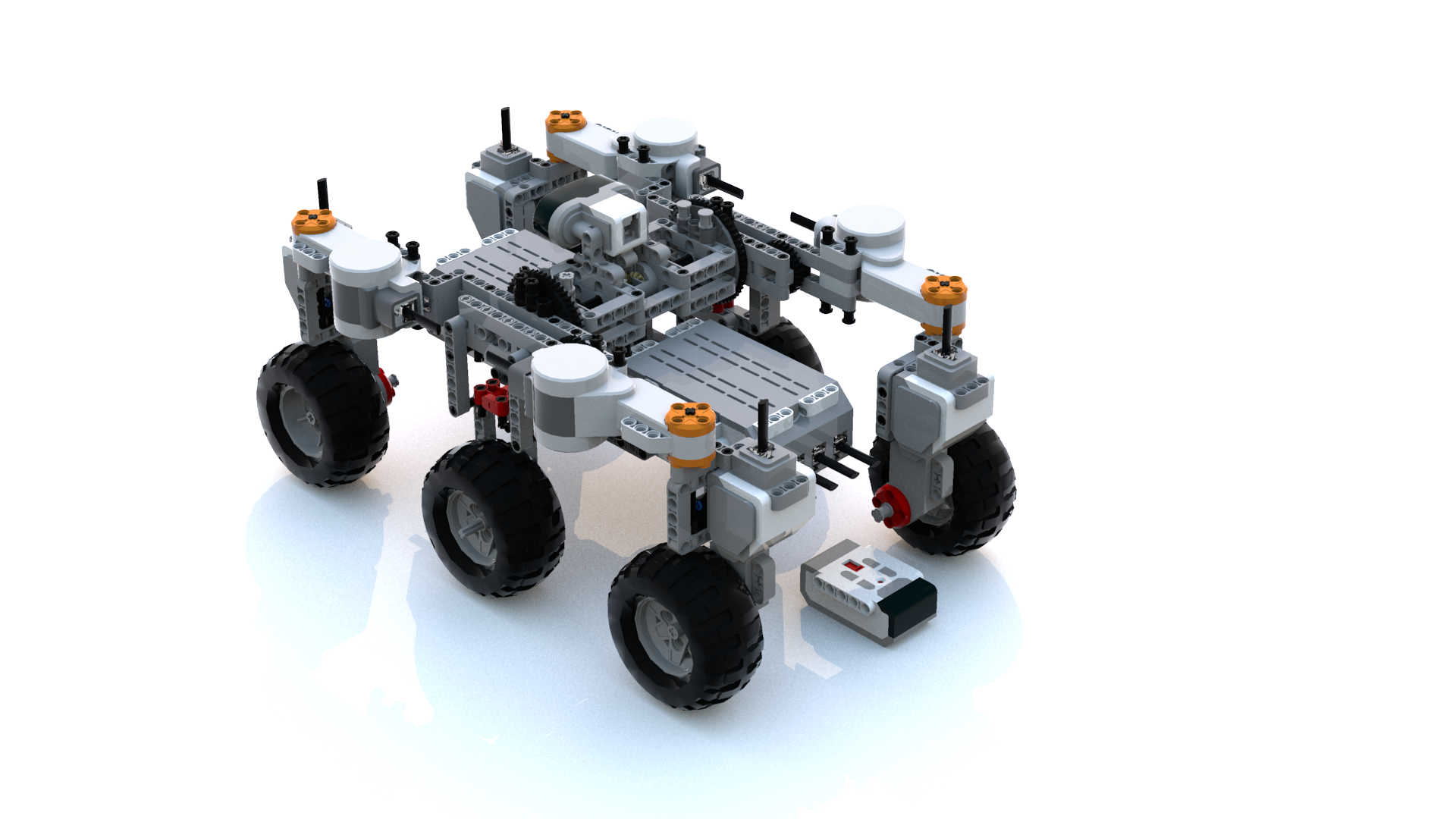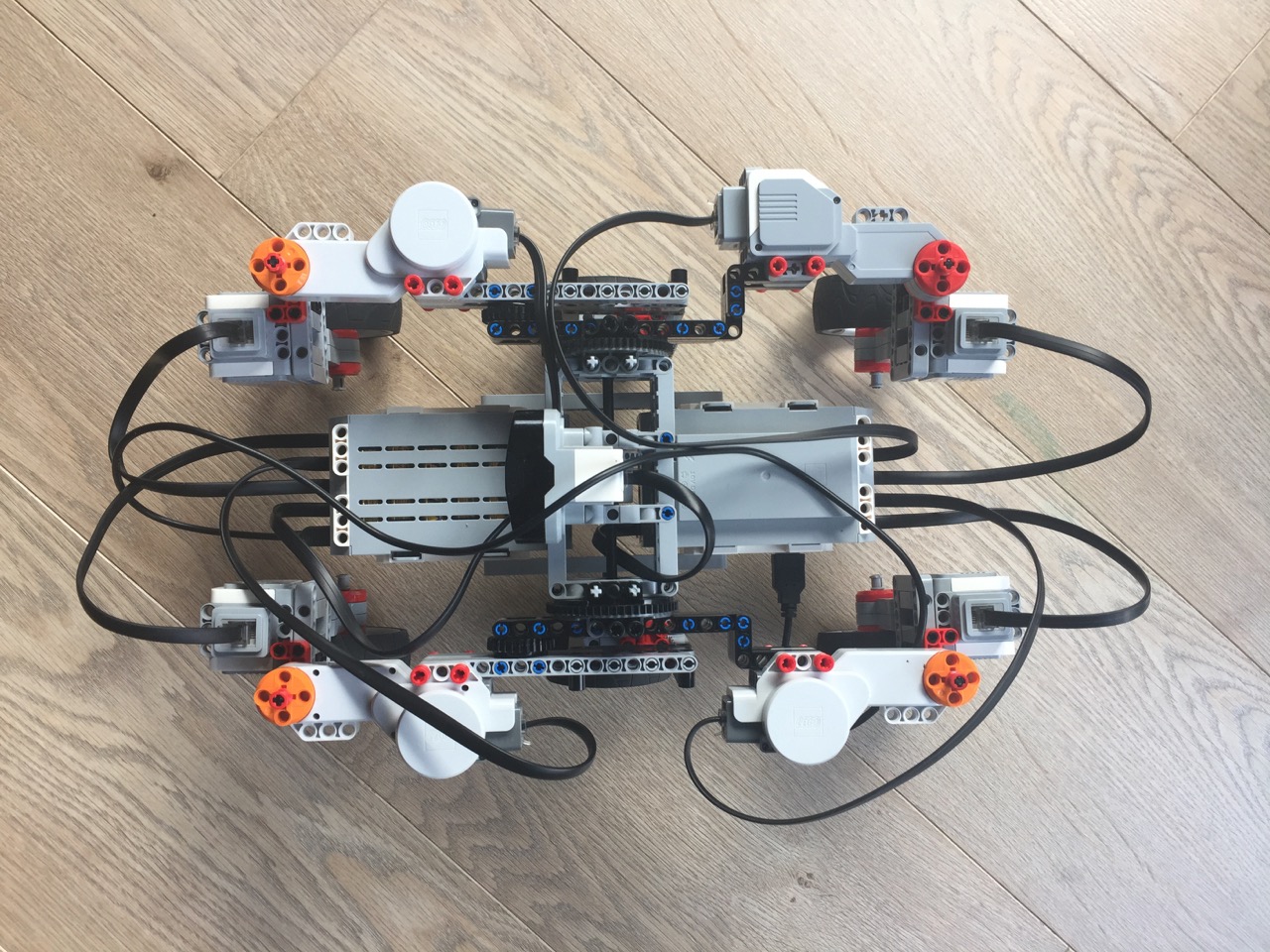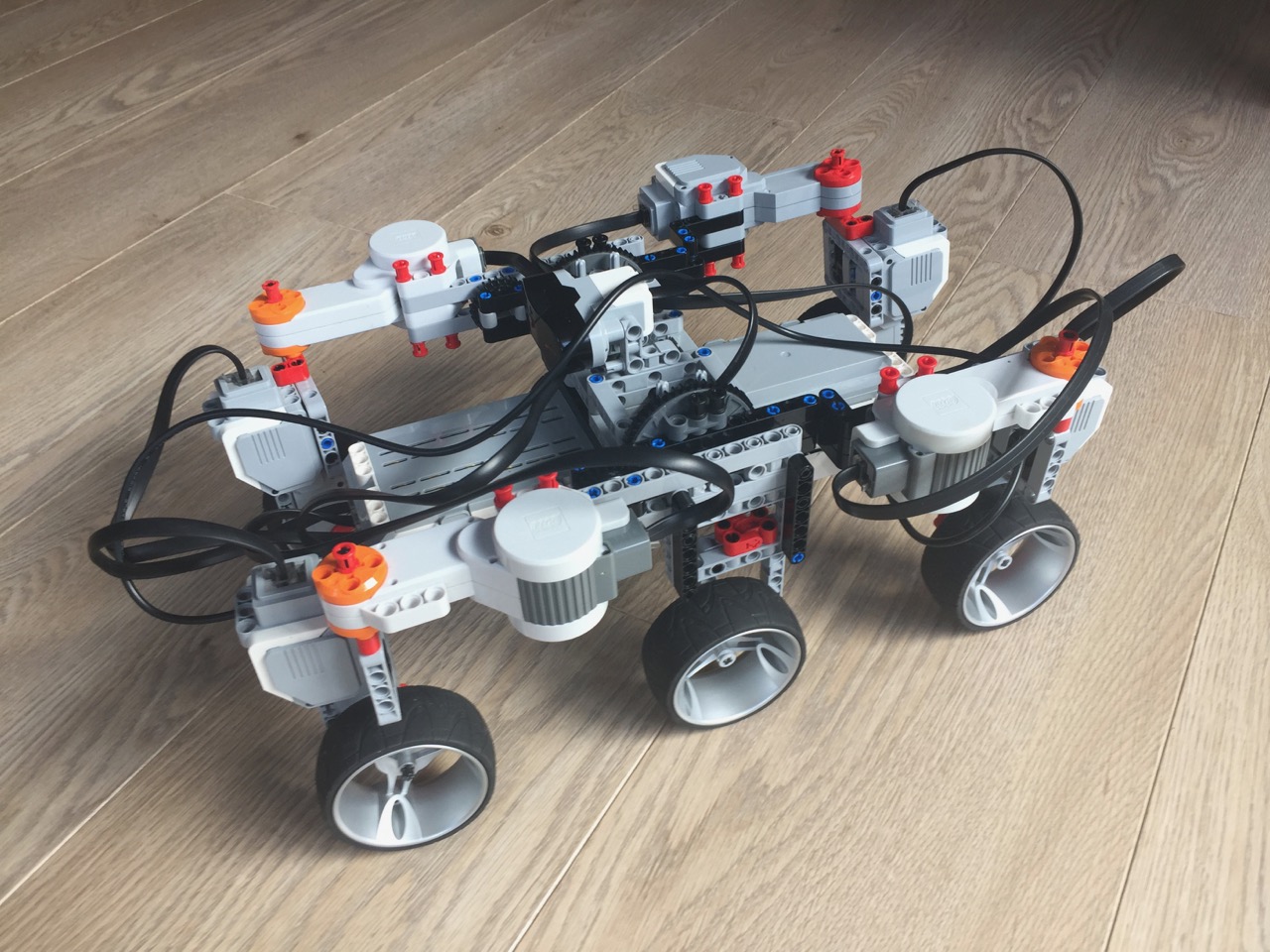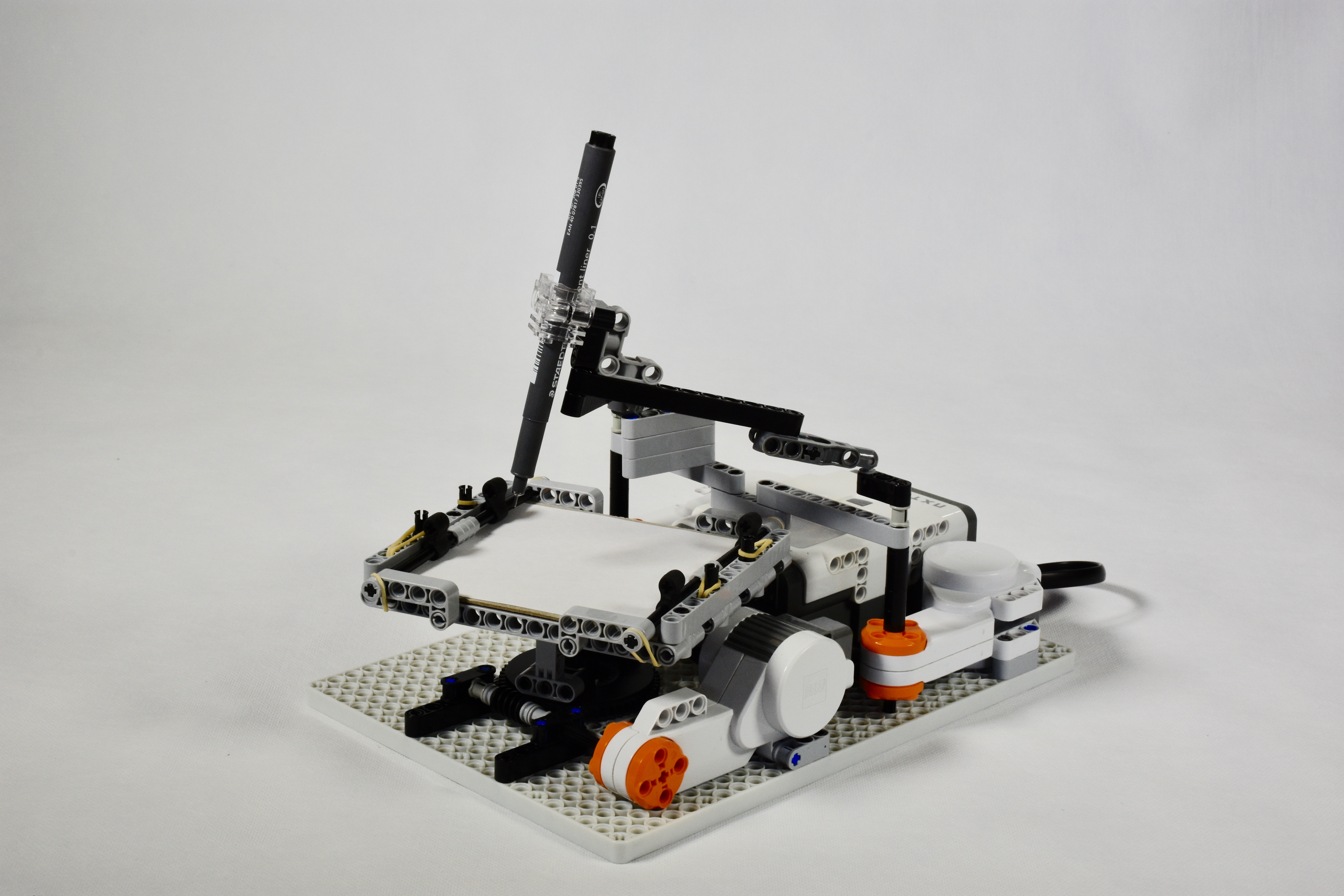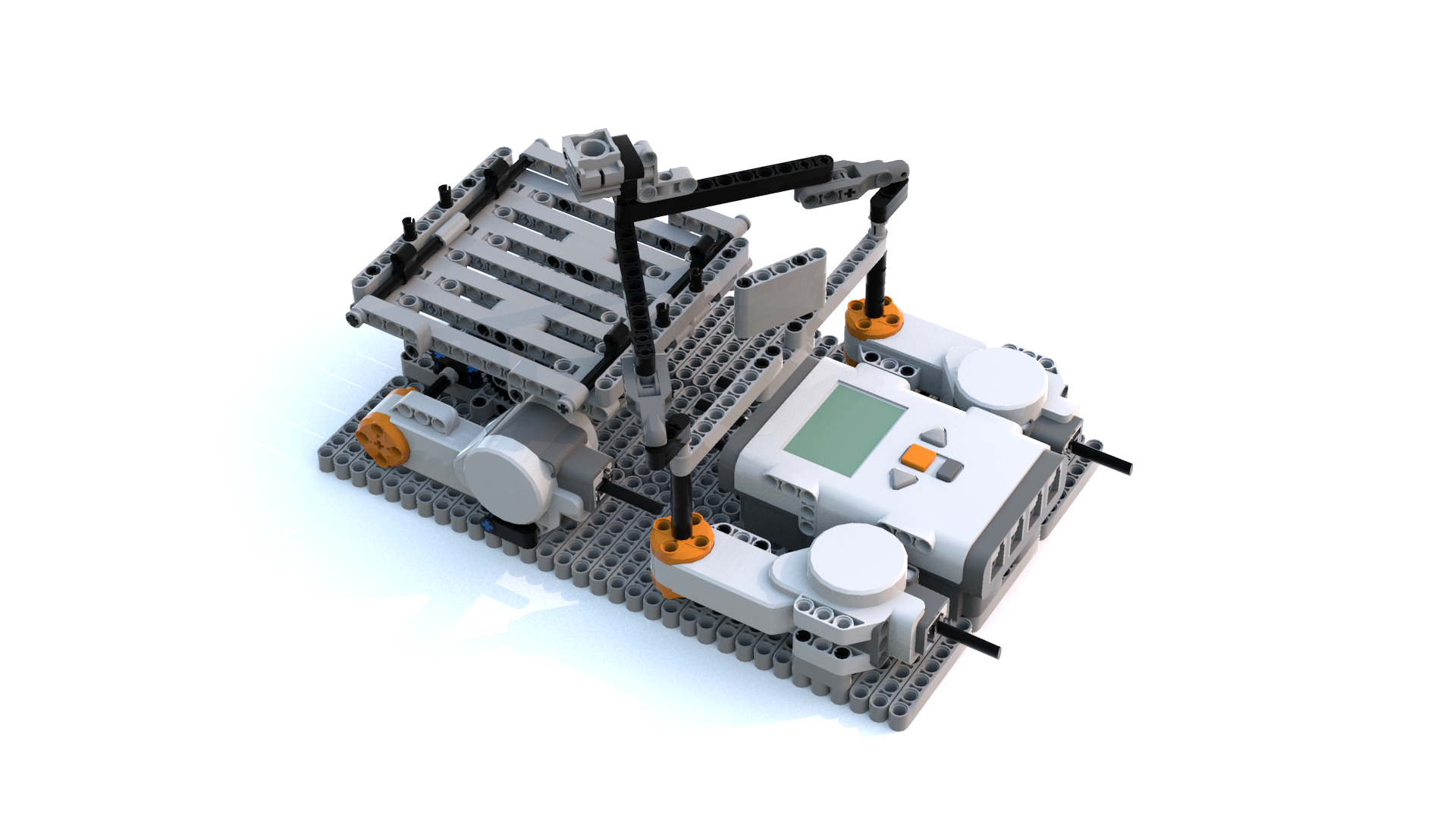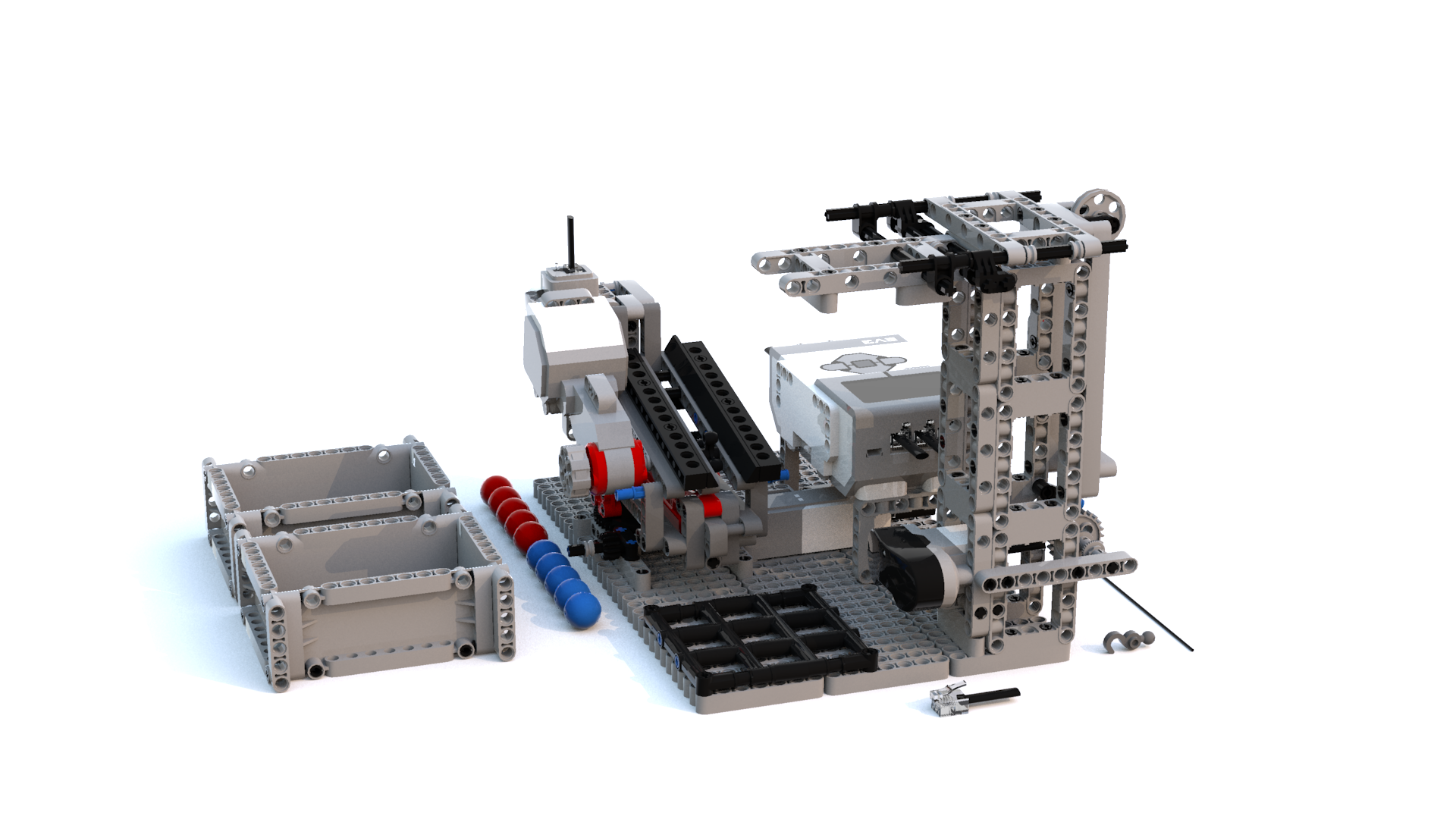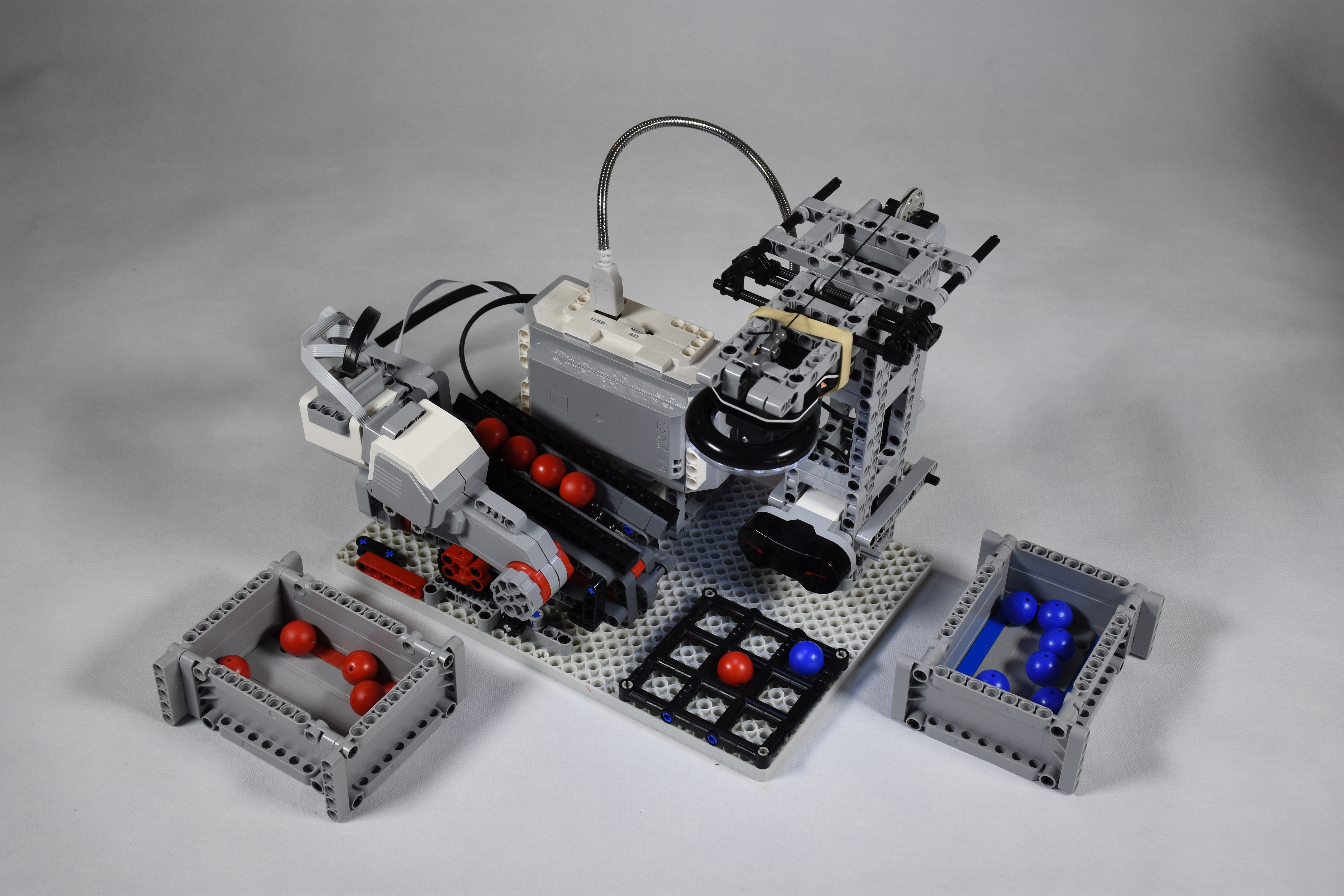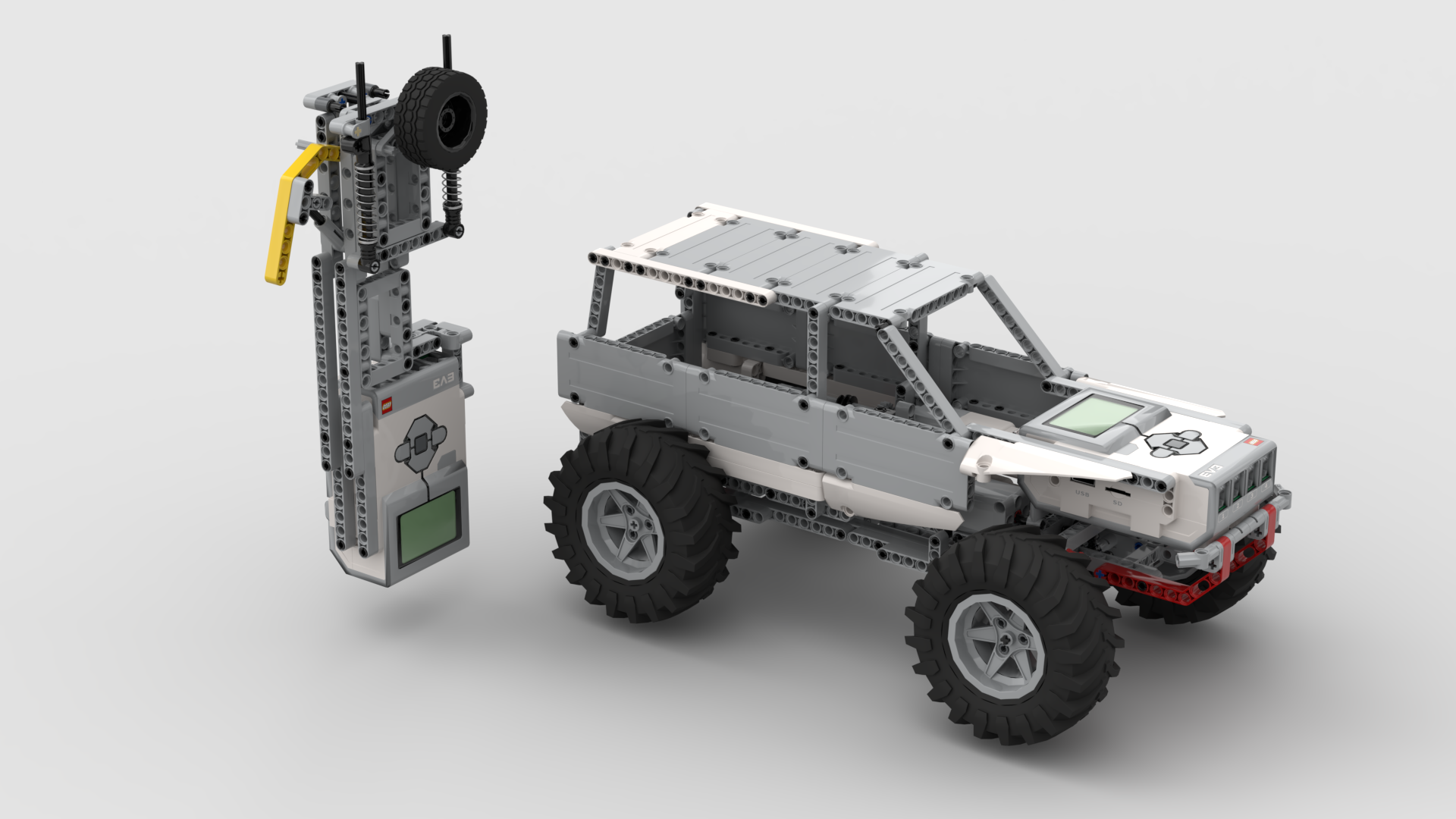
This LEGO remote controlled crawler uses a sequential gearbox from Sariel and a Mindstorms EV3 to control the car. The remote control used force feedback and offers proportional control over speed and direction. It also allows you to change gears and change the forward and backward drive. The two EV3 Mindstorms communicate using Bluetooth. The remote uses two rotation sensors to measure speed and direction.
The building instructions are available for LEGO Digital Designer and Stud.io. Please notice that I had to replace the 35188 Technic Changeover Rotary Catch with another gear in the digital model and I could also not include Mindsensors Glide Wheel Rotation Sensor. These bricks do not yet exist in digital form. I also put up the model are ReBrickable and the inventory there is almost complete. Feel free to also use different wheels. In the LDD model I also had to use other shocks.
Here is a video that explains the model’s function:
And here is the crawler in action: