
A distributed interfaces for time-based media (Version 1.5)
Introduction
Tony is an expressive robot that interacts with the inhabitants of an ambient intelligent home and time-based media. He is based on a previous version, described in Hu Jun’s Master Thesis: “Distributed Interfaces for a Time-Based Media Application” (Eindhoven University of Technology). This version is an in-between step towards far more advanced robot that we are planning to build within the framework of the Performance Space project.
Implementation
Tony is able to drive around, turn his head and express emotions in a scale from sadness to happiness. In addition, he has two arms that are equipped with touch sensors, that the user can press to interact with Tony tactile. Tony uses the LeJos firmware to run Java programs and to communicate via infrared with a PC.
Pictures
Tony in neutral position |

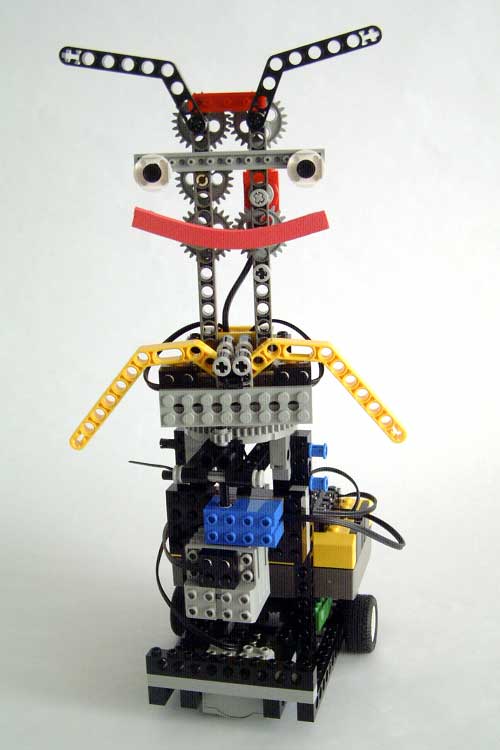
Tony is happy |
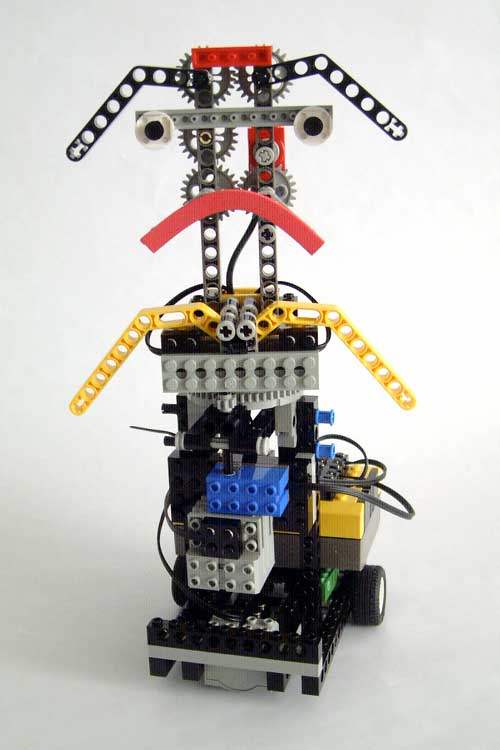
Tony is sad |
Contact
Hu Jun
Eindhoven University of Technology
Department of Industrial Design
Den Dolech 2
5600 MB Eindhoven
The Netherlands
j.hu@tue.nl
Christoph Bartneck
Eindhoven University of Technology
Department of Industrial Design
Den Dolech 2
5600 MB Eindhoven
The Netherlands
christoph@bartneck.de