
This master class prepares for a new type of engineering discipline: design and creation of intelligent systems, products, and related services. The class will be a unique opportunity to get familiar with a number of powerful conceptual and intellectual tools to understand and create adaptive behavior at a system level. The context of Lego is chosen because it is already an example of a system. But in this class the creative goal is to make a leap forward, extending the scope of the existing system such that adaptive behavior becomes the central theme. The new Lego should be equally fascinating for grown-ups and children, women and men. Continue reading “Lego Beyond Toys”
Tag: lego
Tutorial on how to install and run Java on Lego Mindstorms NXT using Eclipse
This tutorial will show you how to install and configure all the software necessary for you to develop Java programs for the LEGO Mindstorms NXT. Java is much more powerful and flexible than the original NXT-G software that LEGO provides. We will be using the Eclipse editor to write the actual Java code and to download this into the NXT. This combination enables you to conveniently write software and to quickly test it on the NXT. Of course there are many other Java editors, but we consider this combination to be particularly convenient. This tutorial focuses on the Windows XP platform, A Mac OS X tutorial is also available. We have two additional steps for Windows Vista. You will work through the following five steps: Continue reading “Tutorial on how to install and run Java on Lego Mindstorms NXT using Eclipse”
Tony
A distributed interfaces for time-based media (Version 1.5)
Introduction
Tony is an expressive robot that interacts with the inhabitants of an ambient intelligent home and time-based media. He is based on a previous version, described in Hu Jun’s Master Thesis: “Distributed Interfaces for a Time-Based Media Application” (Eindhoven University of Technology). This version is an in-between step towards far more advanced robot that we are planning to build within the framework of the Performance Space project.
Implementation
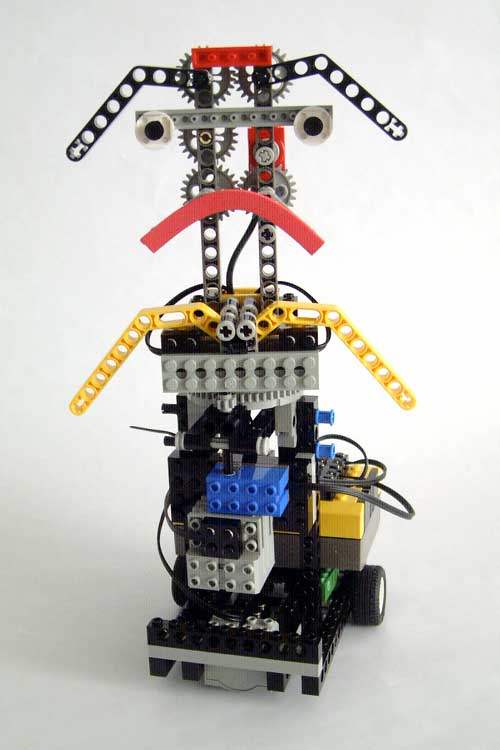
Tony is able to drive around, turn his head and express emotions in a scale from sadness to happiness. In addition, he has two arms that are equipped with touch sensors, that the user can press to interact with Tony tactile. Tony uses the LeJos firmware to run Java programs and to communicate via infrared with a PC.
Pictures
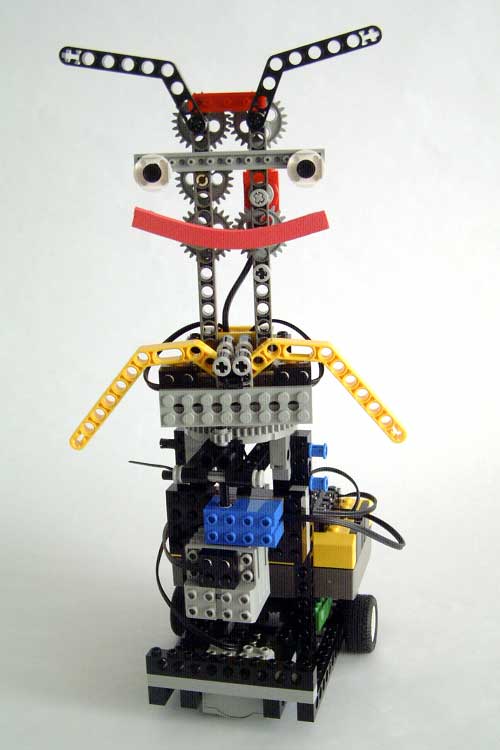
Tony in neutral position |

Tony is happy |
Tony is sad |
Contact
Hu Jun
Eindhoven University of Technology
Department of Industrial Design
Den Dolech 2
5600 MB Eindhoven
The Netherlands
j.hu@tue.nl
Christoph Bartneck
Eindhoven University of Technology
Department of Industrial Design
Den Dolech 2
5600 MB Eindhoven
The Netherlands
christoph@bartneck.de
Emotional Adaptive Robots
In analogy to living creatures in nature, two robots will live in a constrained environment, which forces them to compete for resources. The robots will have certain attributes and behaviors, which will evolve through an adaptive system. This will lead to the development of different strategies for survival. Observers will be able to understand the situation and its dynamics by observing and listening to the emotional expressions of the robots. Continue reading “Emotional Adaptive Robots”
The LEGO Website
On this large scale project I was in charge of the Icons, the LEGO Gallery and the Catalog Overview. Further more I created Flash animations of building tips. Screenshots of that time (click to enlarge):
 The Homepage |
 The region chooser of the catalog |
 The catalog overview |
 An item of the catalog |
 The Technic homepage |
 The embeded Flash animation |
 Adventure |
 Castle |
 Technic |