We are happy to announce that the Robot Interaction Language (ROILA) website is now available at http://roila.org.
![]()
University of Canterbury, New Zealand

We are happy to announce that the Robot Interaction Language (ROILA) website is now available at http://roila.org.
![]()
Welcome to the CHI2004 Workshop on Shaping Human-Robot Interaction – Understanding the Social Aspects of Intelligent Robotic Products. The workshop is being organized by Jodi Forlizzi and Christoph Bartneck. The workshop will take place on Sunday April 25th, 2004. Continue reading “Shaping Human-Robot Interaction – Understanding the Social Aspects of Intelligent Robotic Products”
A distributed interfaces for time-based media (Version 1.5)
Tony is an expressive robot that interacts with the inhabitants of an ambient intelligent home and time-based media. He is based on a previous version, described in Hu Jun’s Master Thesis: “Distributed Interfaces for a Time-Based Media Application” (Eindhoven University of Technology). This version is an in-between step towards far more advanced robot that we are planning to build within the framework of the Performance Space project.
Tony is able to drive around, turn his head and express emotions in a scale from sadness to happiness. In addition, he has two arms that are equipped with touch sensors, that the user can press to interact with Tony tactile. Tony uses the LeJos firmware to run Java programs and to communicate via infrared with a PC.
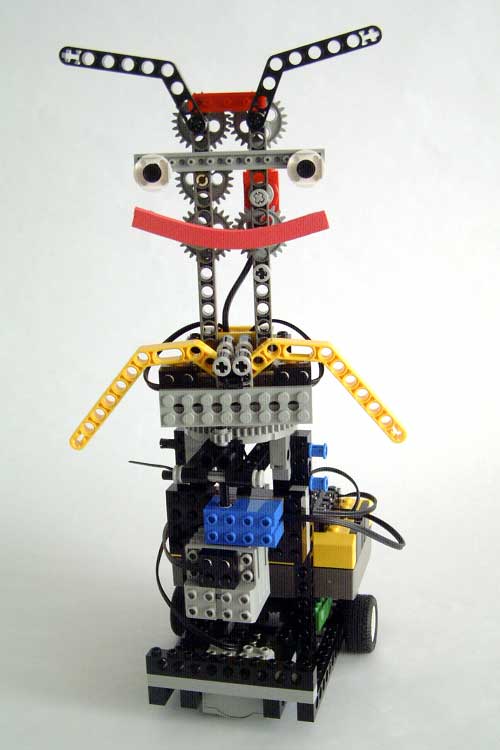
Tony in neutral position |

Tony is happy |
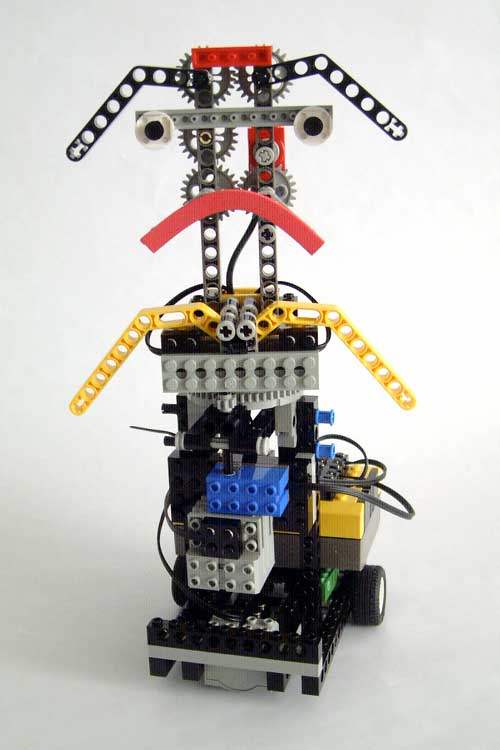
Tony is sad |
Hu Jun
Eindhoven University of Technology
Department of Industrial Design
Den Dolech 2
5600 MB Eindhoven
The Netherlands
j.hu@tue.nl
Christoph Bartneck
Eindhoven University of Technology
Department of Industrial Design
Den Dolech 2
5600 MB Eindhoven
The Netherlands
christoph@bartneck.de
Humans, both consciously and unconsciously, use subtle expressions to communicate their emotions and intentions through variations of the gaze direction, pitch of speech and gesture speed. They form their own class of communication acts. Embodied characters, including robots, need to use subtle expressions to become believable communication partners.
The design and evaluation of subtle expressivity are challenges for designers and researchers of embodied characters. How do the subtle variations in expression influence the interaction? What types of subtle expressions are most important for the design of interactive media? How can the effect of the expressions be reliably measured? Continue reading “Subtle Expressivity For Characters And Robots”