

The Govenor General, Jerry Mateparae, visited the HIT Lab NZ on March 9th, 2016. We presented our main research areas to him, including Human-Robot Interaction. Jerry Mateparae seemed to enjoy the performance of our robots, but his Aides-de-Camp looked, well, I am not sure how to read his face. Continue reading “Governor General visits the HIT Lab NZ”
Category: Featured
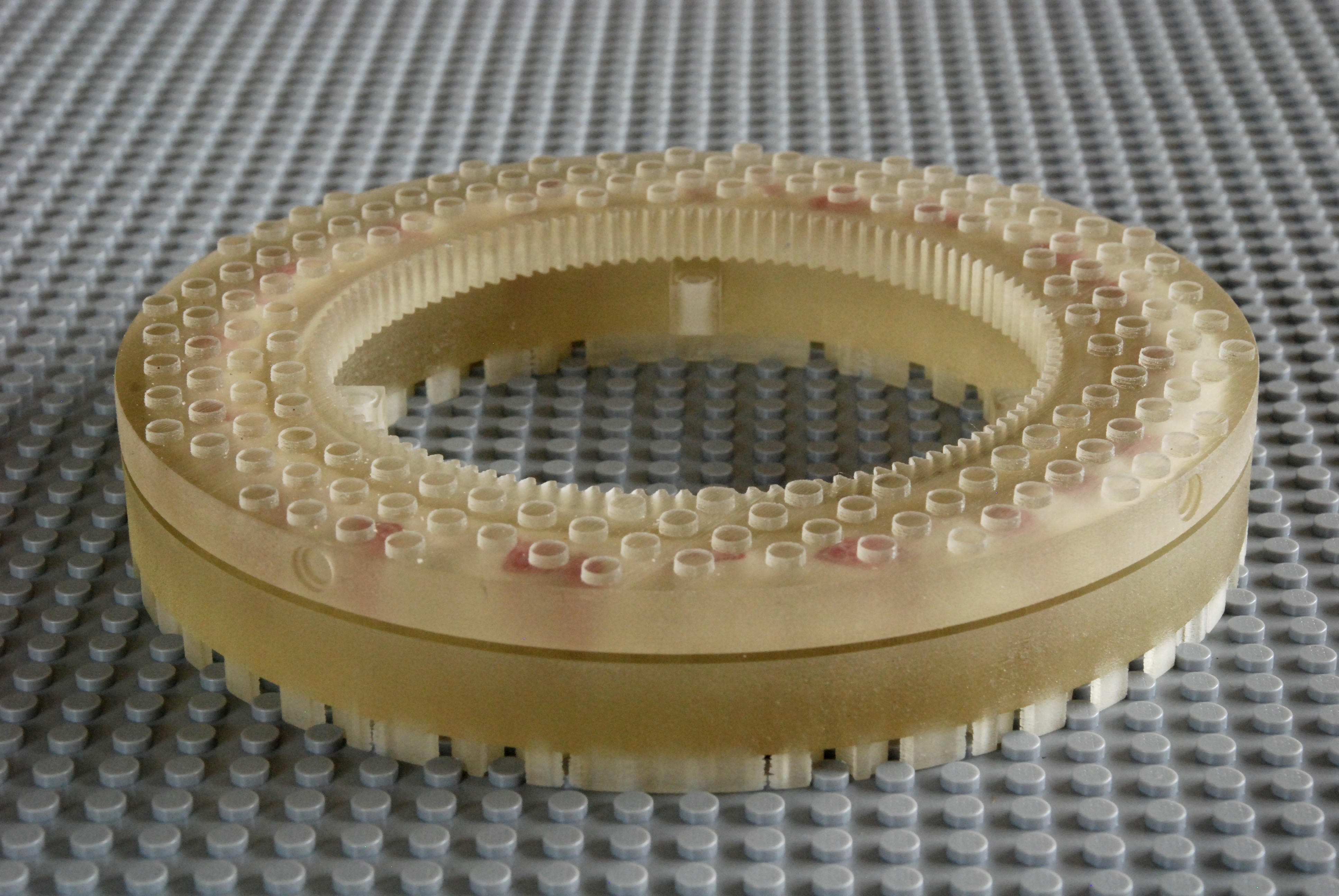
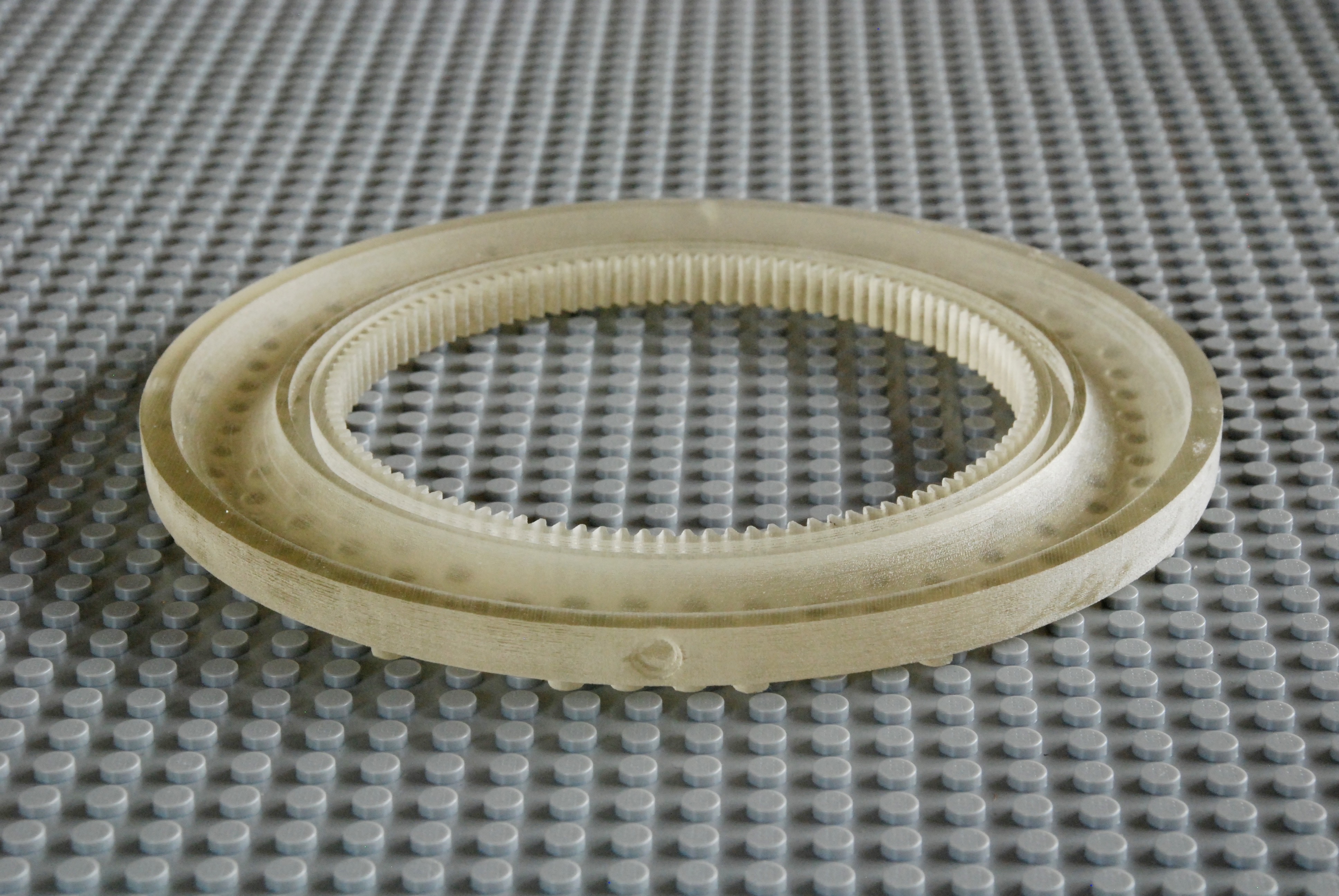
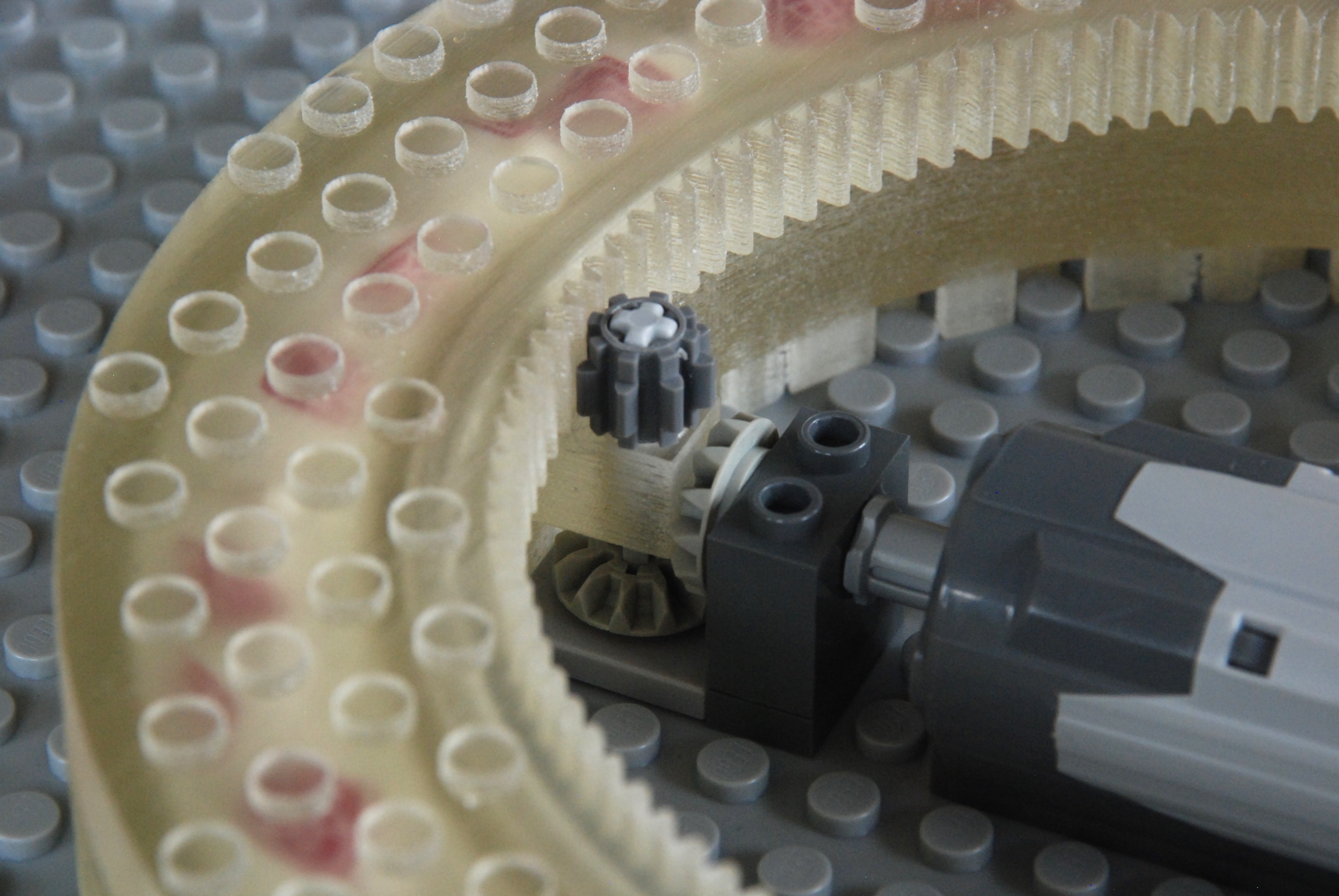
LEGO compatible thrust ball bearing
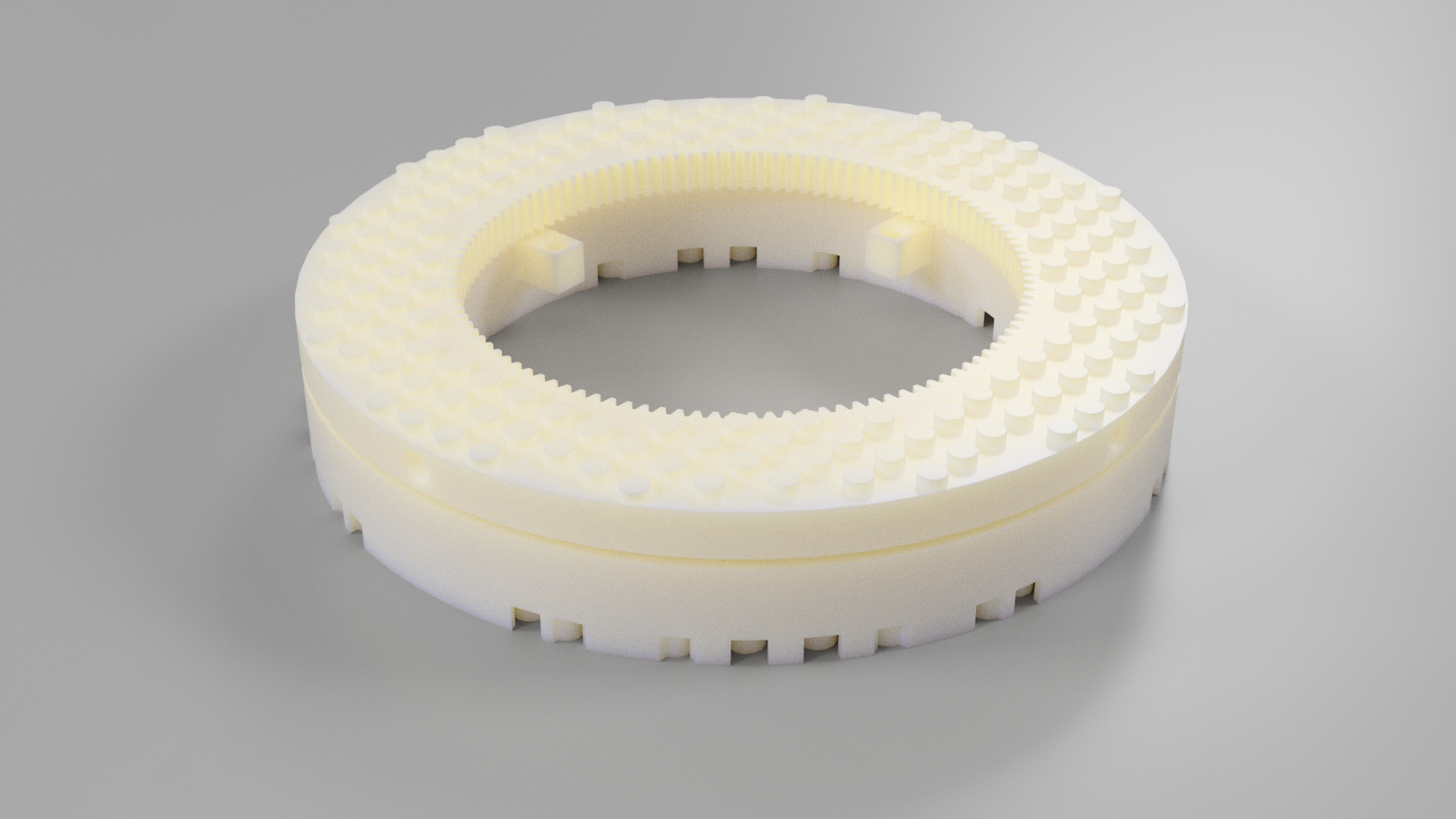
To rotate an axial load LEGO developed the turn table. For light loads this works great but the friction increases dramatically with heavy loads. This thrust ball bearing uses standard LEGO balls to transform the friction into rotations. This allows the two disks to easily rotate. The balls and an additional rim keep the two disks in place.
A motor can be attached on the inside to power the rotation. Even the smallest LEGO motor is sufficient to easily rotate this 2 kg load. This thrust ball bearing is fully LEGO compatible and even allows studs to be attached to top half. Standard 14.2 mm LEGO balls can be used. The bearing measures 20 studs across and is three bricks high. This should be big enough for even the biggest crane or MOC display.
The 3D data is available from the Autodesk Gallery and GrabCAD.



LEGO Pictorial Scales for Assessing Affective Response

We have just published a nice study in which we developed and tested Emotion Rating Figurines (ERF) that allows you to assess emotional responses. The figurines are base on LEGO Minifigures. We developed a questionnaire sheet and also a physical model.
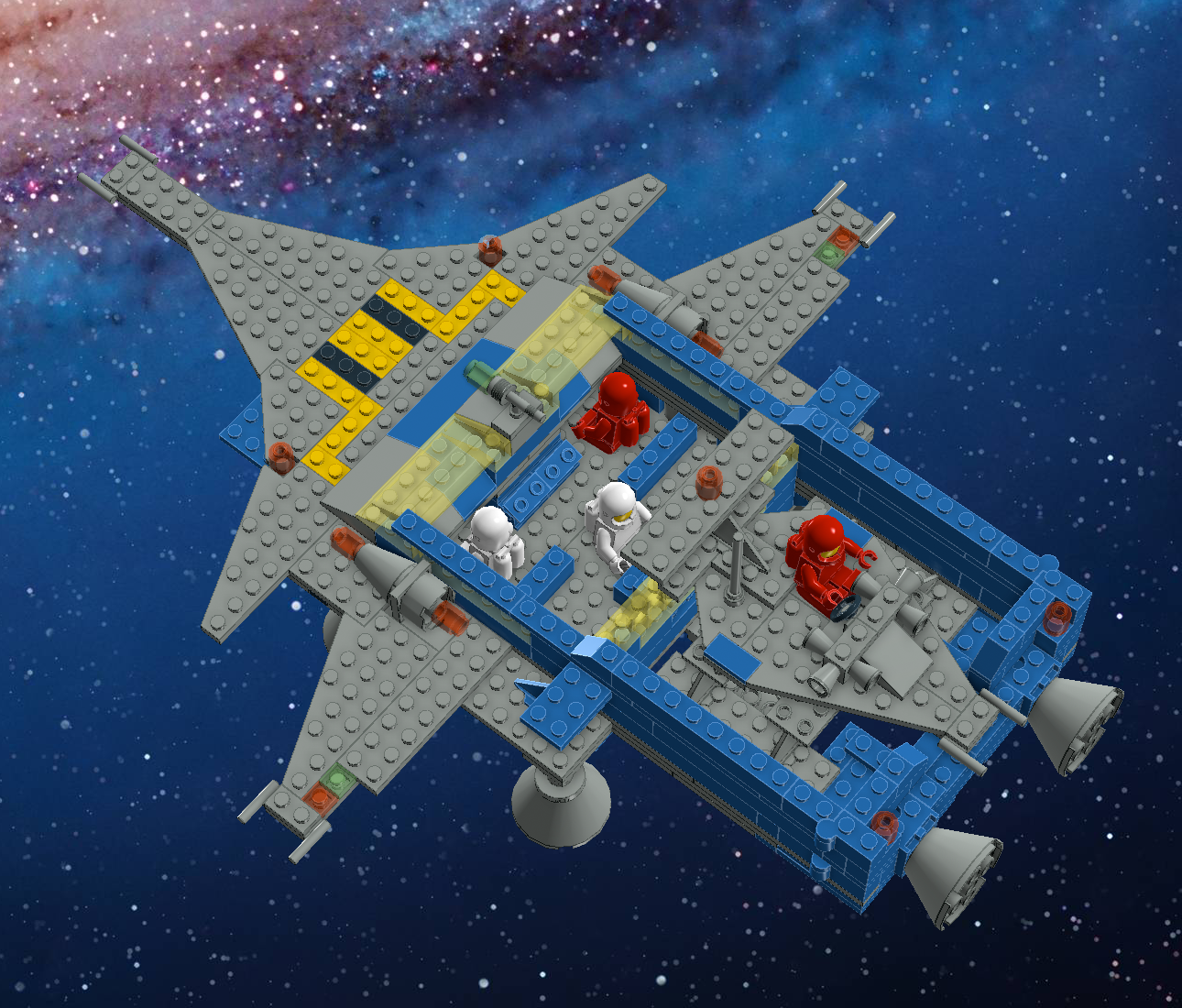
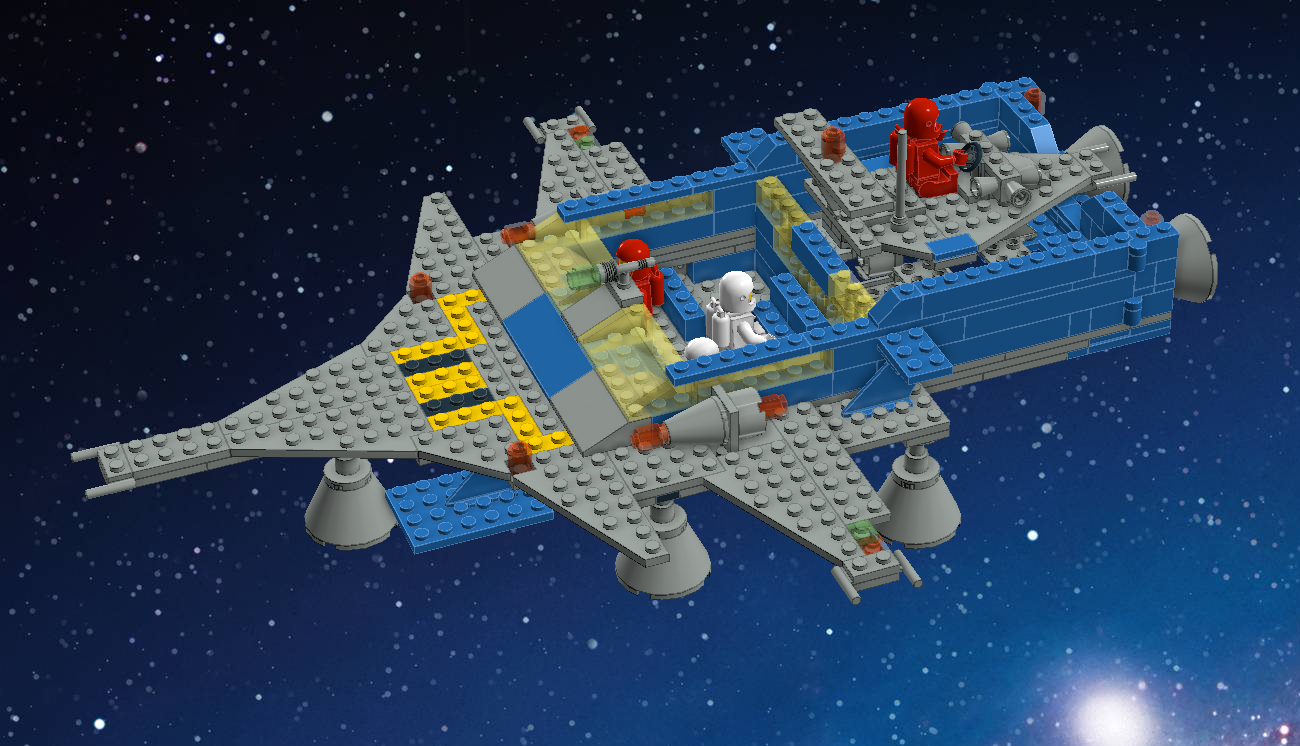
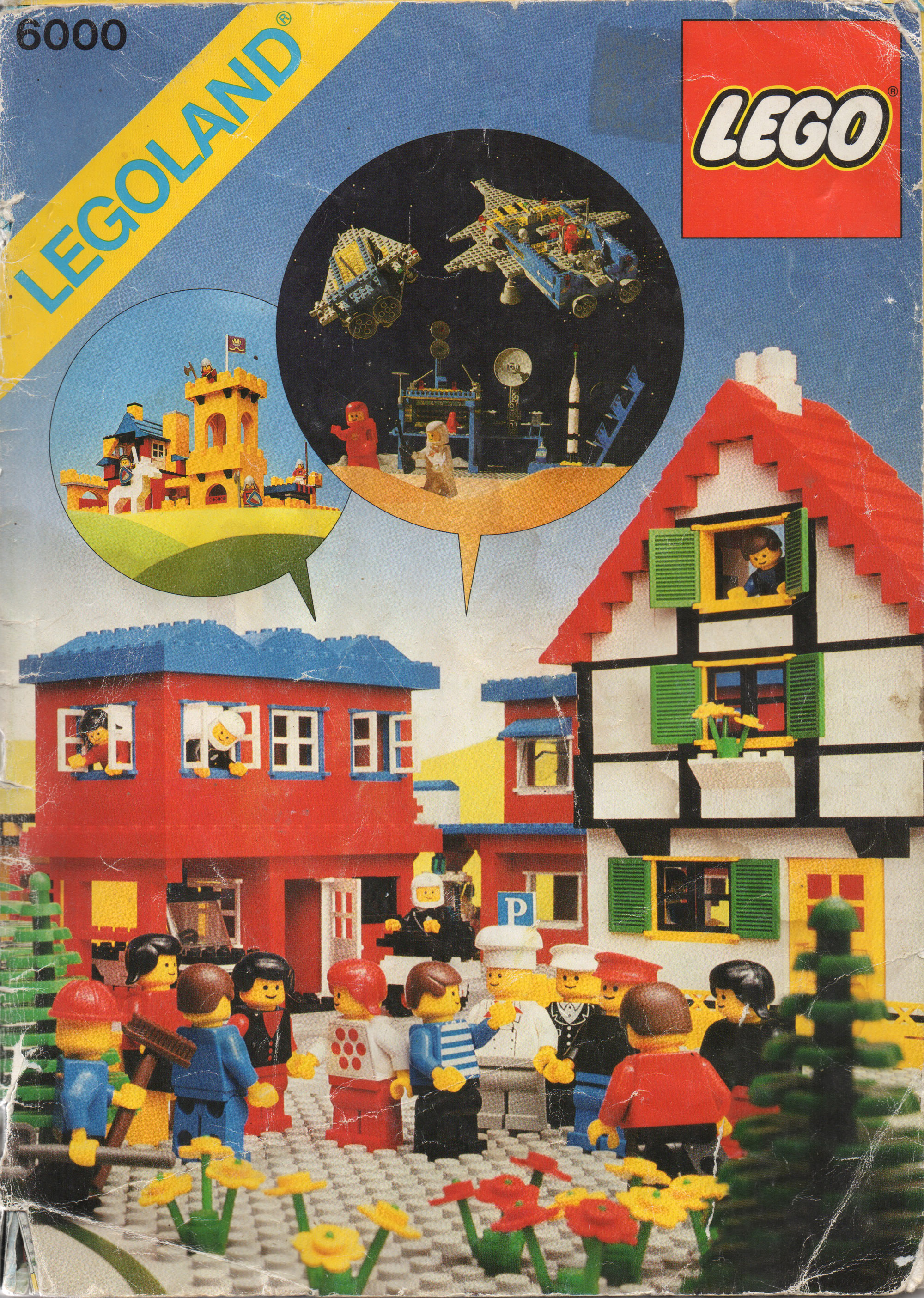
Galaxy Explorer 6000
The LEGO Galaxy Explorer is amongst one of the most popular sets of all times. In 1980 LEGO published the Idea Book 6000 that contained an alternative build for the Galaxy Explorer. The building instructions were sketchy at best. I built the Galaxy Explorer 6000 model for the Moonbase 42 at the Christchurch Brick Show 2015 and I also created an LDD file for it. The building instructions are available here. It has been great fun to re-create this spaceship from my childhood. I hope you enjoy it.


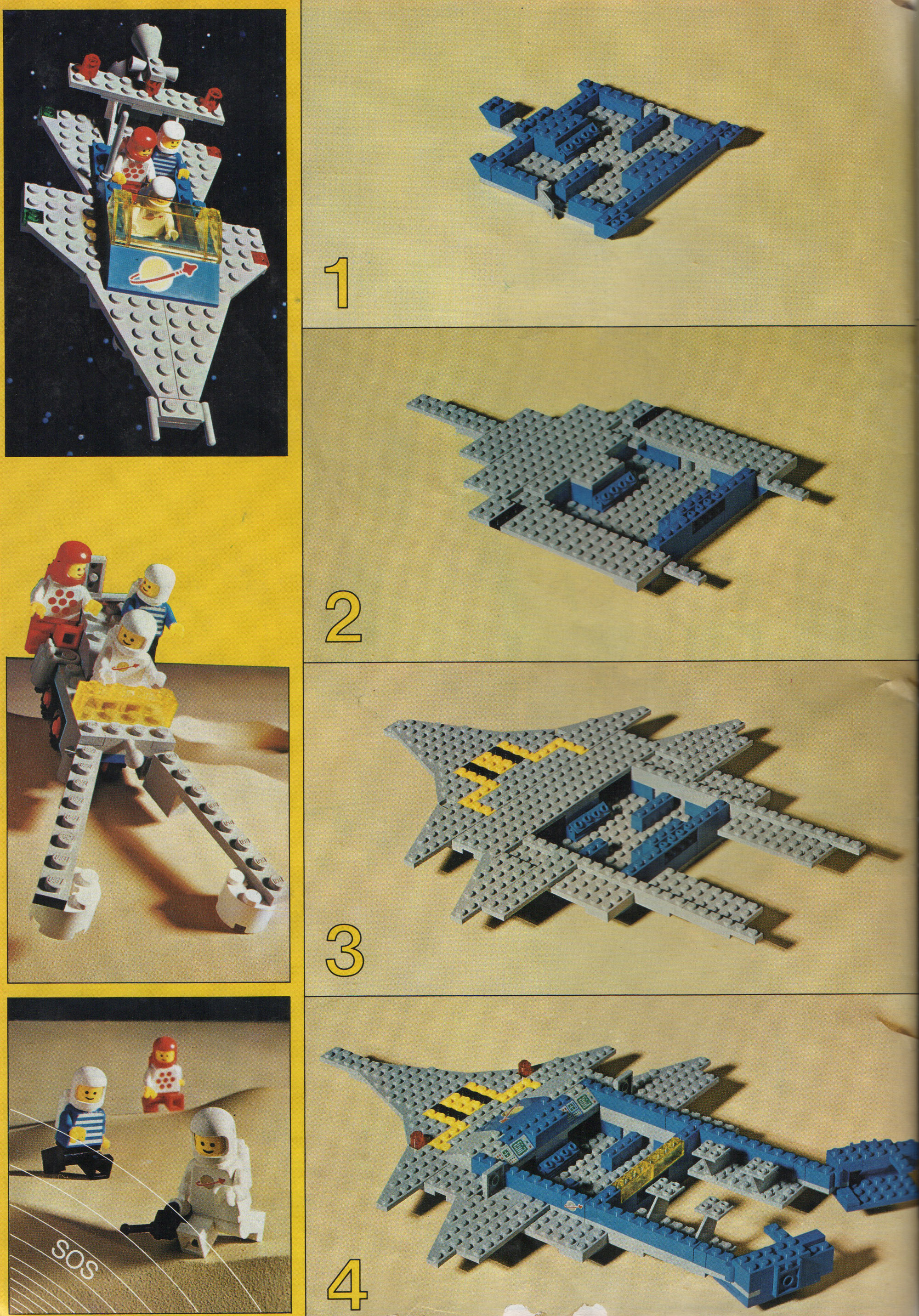
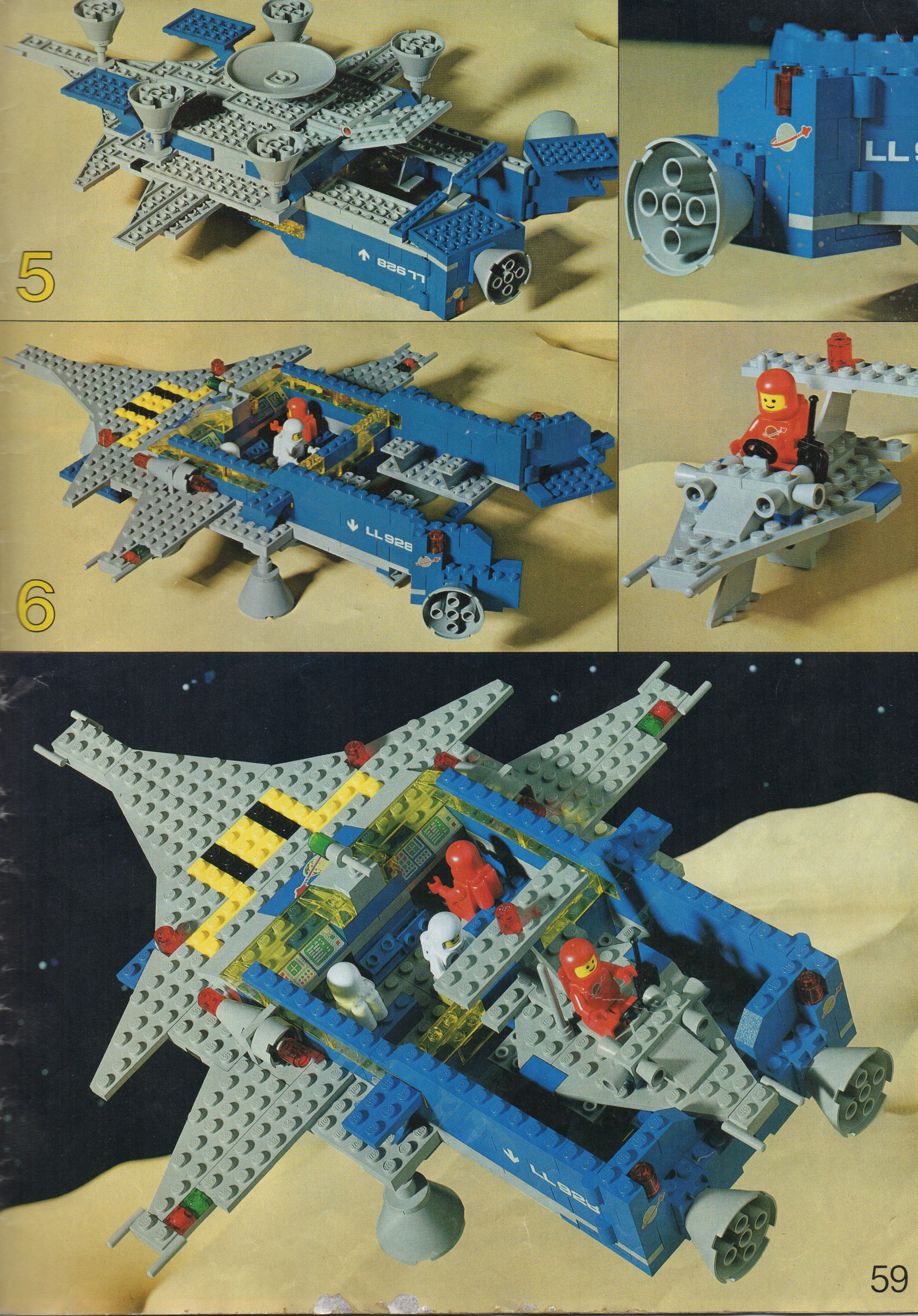
Here is the original 497 Space Explorer in all its glory:
The Robot Engine Used For A LEGO Arduino Robot

We build a new LEGO robot based on the popular LEGO flash lights. We use custom made 3D printed parts to put small servo motors into its head, chest, arms and legs. The robot has six degrees of freedom. In addition we embedded a camera, microphone and speakers into the robot. The robot is controlled through an Arduino micro-controller. We used The Robot Engine to create animations for the robot and to design interactions with users. The paper will be presented at the Ro-Man2015 conference in Kobe.
Here are some useful resources for you if you intend to build a similar robot:
- 3D files for the custom parts
- Building instructions for the robot
- Tutorial for the software setup
- Tutorial extension for the software setup
- The Robot Engine software
The credit for this robot go to:
- Shogo Nishiguchi
- Guillaume Vandenbor
- Marius Soucy
- Kevin Fleuret
- Eduardo B. Sandoval