I built a new version of my Race cars series (Race1, Race2) with the logical name Race3. This time I am using the SBrick to control the car which gives its proportional steering control. This is great for driving curves. Race3 features individual suspension, ball bearings and a very low centre of gravity. You can drive it up and down pretty much any rock or mountain. Here is a video of what it can do.
And here are some photos of the model. Building instructions are also available. I also put up this MOC over at Rebrickable.
Racing LEGO cars down a ramp is a popular attraction not only in the LEGOLAND Parks, but also at Brickshows and classrooms around the world. The physics around the race are well understood, but experiencing them in practice is a great learning experience for students.
We setup a little ramp race at home and I would like to share our setup and results with you. We put two base plates together as the ramp and inclined it at ten degrees. We then measured four meters from the starting point up the ramp to the finishing line.
Of course, you can race multiple cars at the same time but then you might encounter collisions and photo finishes too close to call. A reliable and precise measuring system is a much better solution. The SpeedClock App is just what you need. It allows you to measure the speed of a car with a smartphone. You can for example place the phone at the end of the ramp to measure the LEGO car’s maximum speed. You can also synchronize two phones running the app and measure between a start and finish gate. We tried both methods. All races were completed three times and the times and speeds reported are averages.
We started with a typical LEGO car (150gr) and it took it 4.42 seconds to complete the four meter distance. We then started to use my special Ramp Racer. It uses Mindsensor’s ball bearings, large wheels and a heavy battery pack (324gr). It’s maximum speed was 4.3 km/h and it took 3.4 seconds to complete the four meters distance. The same car without the batteries (148gr) had a maximum speed of 4.06 km/h and it took 4.2 seconds to complete the full track. Last we tested the Ramp Races with another set of wheels for which I also had rubber tires. With the rubber tires it took 3.7 seconds to complete the race and 3.6 seconds without.
In conclusion, the ball bearings make the car significantly faster and large hard wheels are best. The heavy batteries conserve the kinetic energy and result in a winning car. For a fair competition a maximum weight should be set. Since the ball bearings used were not from the LEGO company a policy on using third party parts is also advisable.
This is a very small, robust, reliable and easy to maintain buggy. It is ideal for letting your kids play with all day. The design goal was to make a robust car as small and simple as possible. This means most of all no suspension system since that would require the use of CV joints. They are known to break and while they work nicely in LEGO super cars that you carefully push around the floor, it does not work with kids trying to race and crash their RC cars. CV joints will break. Of course it is possible to create a LEGO RC car with suspension and even four wheel drive/steering, but then you end up with LEGO’s own RC Crawler. The goal was to keep it small, simple and robust.
One of the problems I encountered when letting kids play with the RC cars all day is that the axles in the differential tend to slip and move out. I hence build a differential assembly in which the axles are completely locked in and cannot move. The worst thing that could still happen is that a wheel comes off which is easy to fix.
The car uses only one L-Motor and is pretty fast for that. The turning radius is very tight and the car is just fun to drive. The differential makes it perfect to drive around tight corners. The heavy battery pack is right on top of the back axle, giving it the best friction. Well, it does not accelerate like an F1, but it might still make a small difference.
The Building Instructions do not contain the L-Motor and the servo motor since they are both not yet part of Digital Designer. The Yellow Buggy is also available as a 3D file (LXF) for LEGO Digital Designer. Head over to Rebrickable for the Yellow Buggy MOC and its part list.
I also ran Bluerender to make a nice 3D spin of the car.
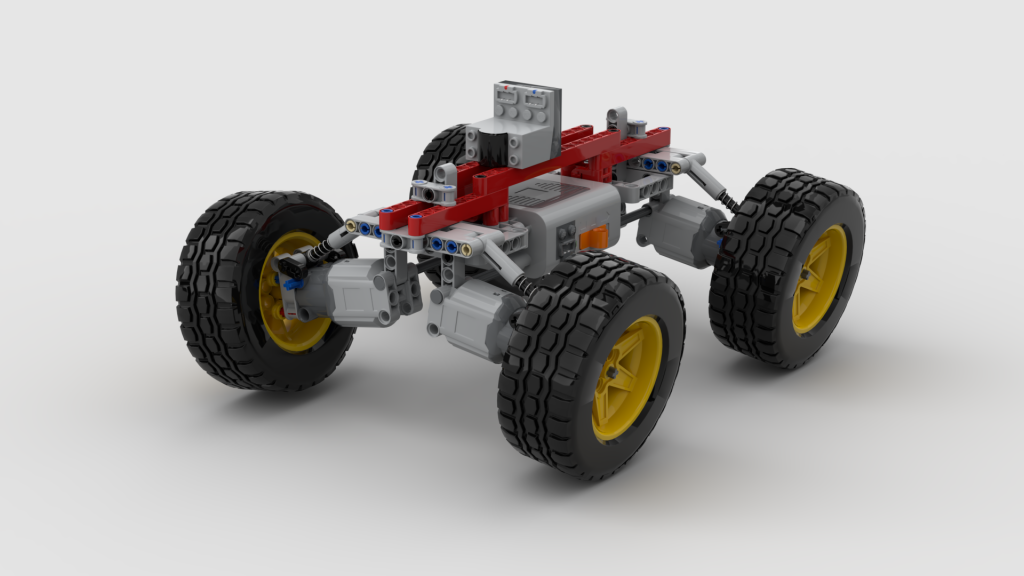
This video shows the smallest remote controlled LEGO Off Road car I have build so far. It features a servo steering, an L motor for driving and full suspension.
It has long been a dream of mine to build a remote controlled LEGO car. LEGO has many Technic cars in their program that use the Power Functions to remote control certain functions, such as opening doors or lifting an arm. Power Functions use infrared light for communication between the sender and the receiver. In the past, LEGO also had remote controlled cars that use radio frequencies, which is much better, since it does not require a line of sight and has a much further reach.
Recently, LEGO released the 4×4 Crawler and it really triggered something inside of me. I ordered the set, but when it arrived I never put it together. I started to build my own cars right away. I looked for inspiration on the internet and found many great off road cars, trial trucks and multi purpose car technology. In particular the work Pawel “Sariel” Kmiec. Check out his book “The Unofficial LEGO Technic Builder’s Guide” or visit his website. LPE Power also has some wonderful instructions on how to build real car technology with LEGO. Continue reading “Building an off road car with LEGO Technic”