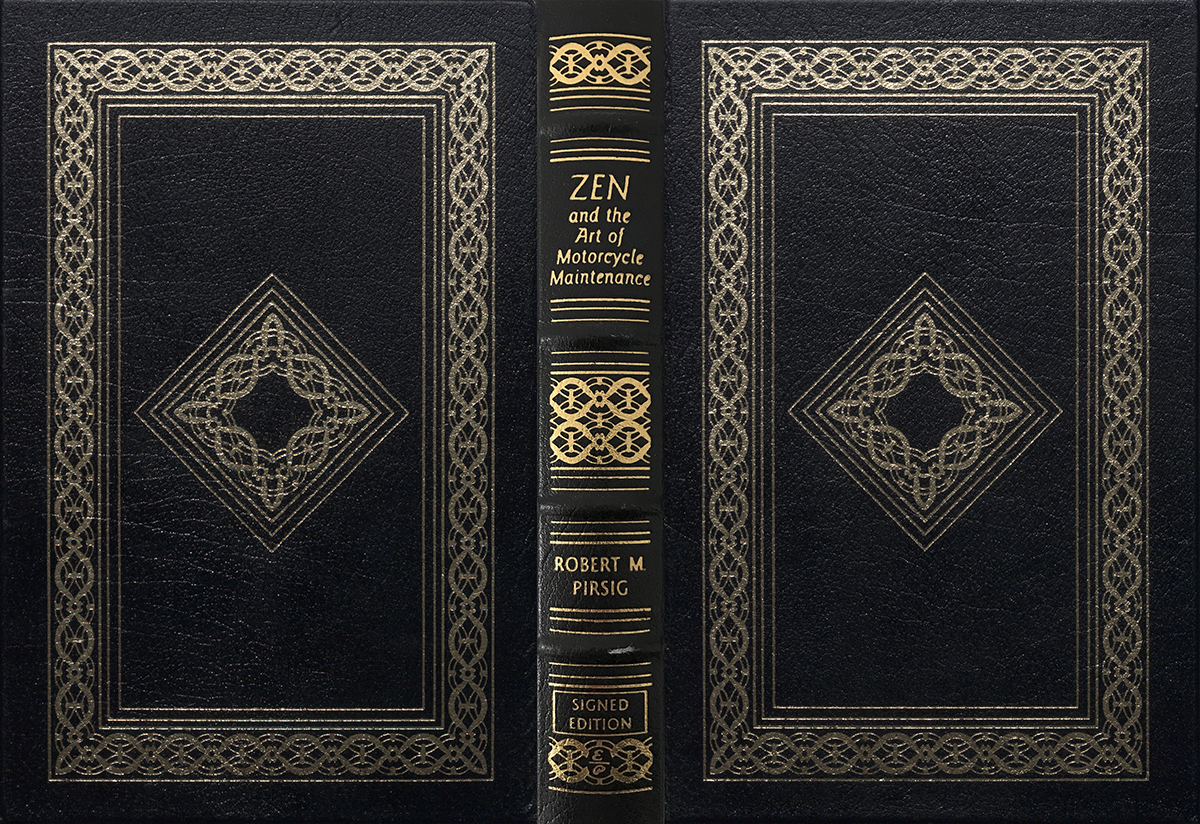
I admire Rober Pirsig’s work on the Metaphysics of Quality as described in his two books Zen and the Art of Motorcycle Maintenance and Lila. Robert passed away in 2017 I started to collect all the English editions of his books. I wrote an article entitle “The Design History of Robert M. Pirsig’s Books” in which I analysed all these books and their covers. The book proposal for Zen was rejected by 122 publishers. My article was rejected by only nine journals but this was done sequentially, which took almost a year. It seems like Pirsig’s curse is upon this manuscript. Academic publishing remains difficult and I recently interviewed Anton Angelo about it.
It is time to take a new approach and hence I decided to publish the article in the Humanities Commons. Please enjoy the article. High resolution scans of all the book covers are available over at the Open Science Framework. I also published the scans of all the covers over at Flickr. Have a look at the Zen and Lila albums.
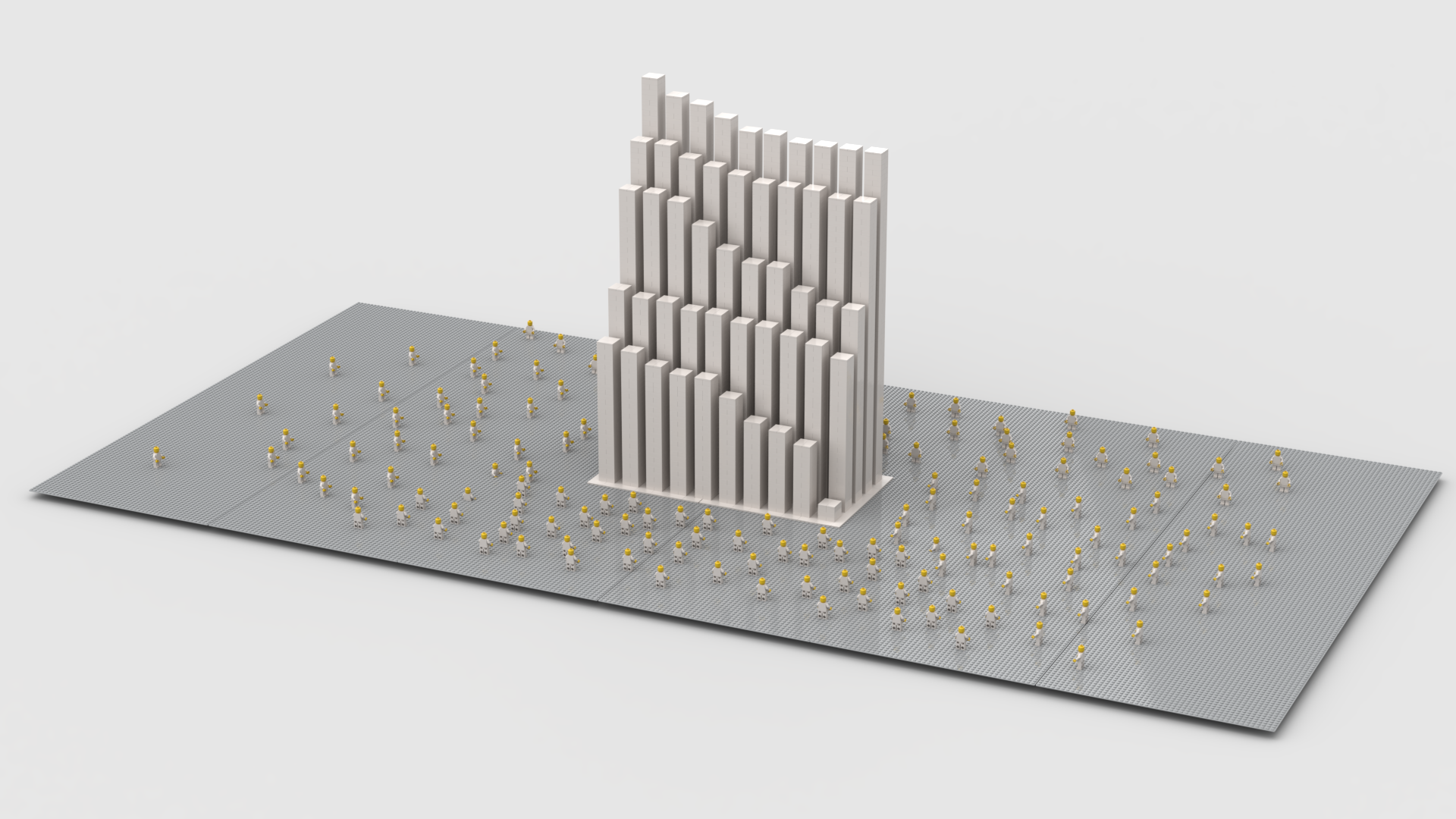
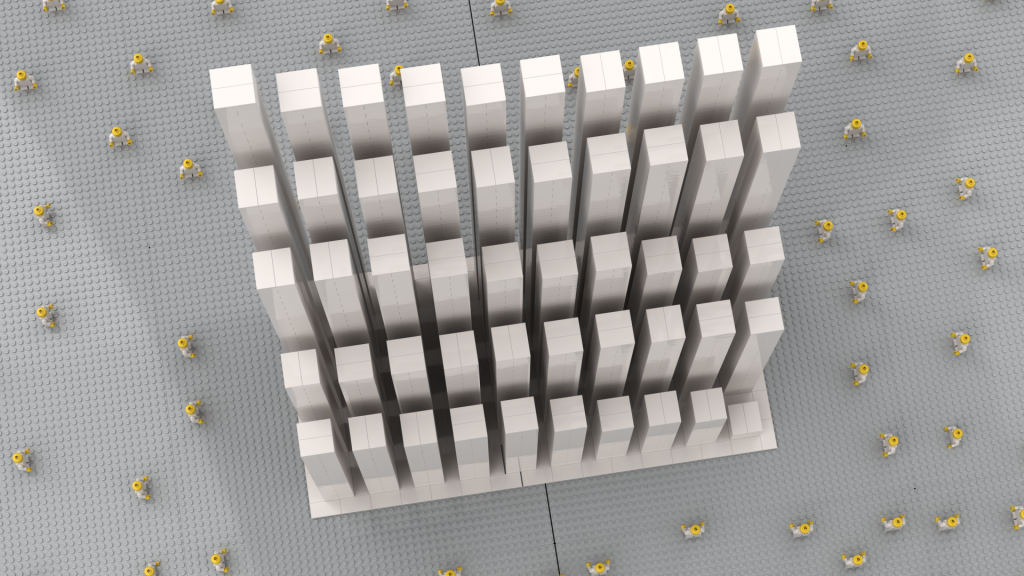
Proposal for a LEGO memorial for the Christchurch Mosque Shooting victims.
On Friday March 15th 2019 New Zealand experienced its biggest terrorist attack in Christchurch that took the lives of 50 people. The loss to their families and their community is indescribable. It is our responsibility to pay respect to the victims, their families and their communities. Moreover, we must take action to prevent that such an event will ever happen again.
For this purpose we propose to build a memorial exhibit for the Christchurch Brick Show. The exhibit will consist of two parts.
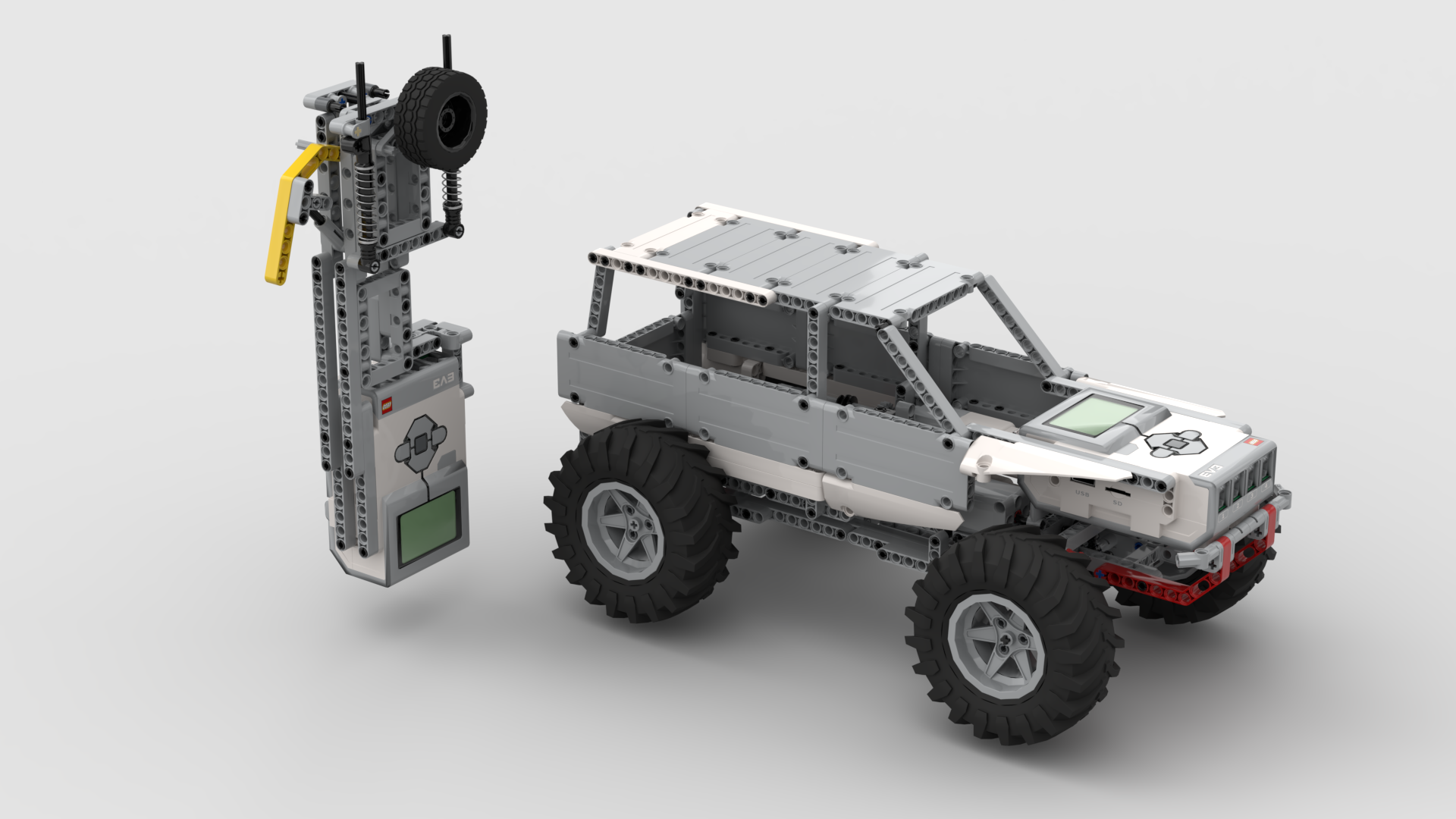
This LEGO remote controlled crawler uses a sequential gearbox from Sariel and a Mindstorms EV3 to control the car. The remote control used force feedback and offers proportional control over speed and direction. It also allows you to change gears and change the forward and backward drive. The two EV3 Mindstorms communicate using Bluetooth. The remote uses two rotation sensors to measure speed and direction.
The building instructions are available for LEGO Digital Designer and Stud.io. Please notice that I had to replace the 35188 Technic Changeover Rotary Catch with another gear in the digital model and I could also not include Mindsensors Glide Wheel Rotation Sensor. These bricks do not yet exist in digital form. I also put up the model are ReBrickable and the inventory there is almost complete. Feel free to also use different wheels. In the LDD model I also had to use other shocks.
Here is a video that explains the model’s function:
Taking 360 degrees panoramic photographs has become easy due to the arrival of dedicated 360 cameras, such as the Ricoh Theta V. But their 4K resolution is spread thin across the whole 360 degree viewing angle. There is still a need to panoramas with high resolution that can only be taken by stitching multiple photographs together. The GigaPan Epic Pro is a robotic camera head that tilts and pans your camera before triggering the shot. You can stitch hundreds even thousands of photos together into one GigaPixel panorama. I have uploaded a few on GigaPan’s website.
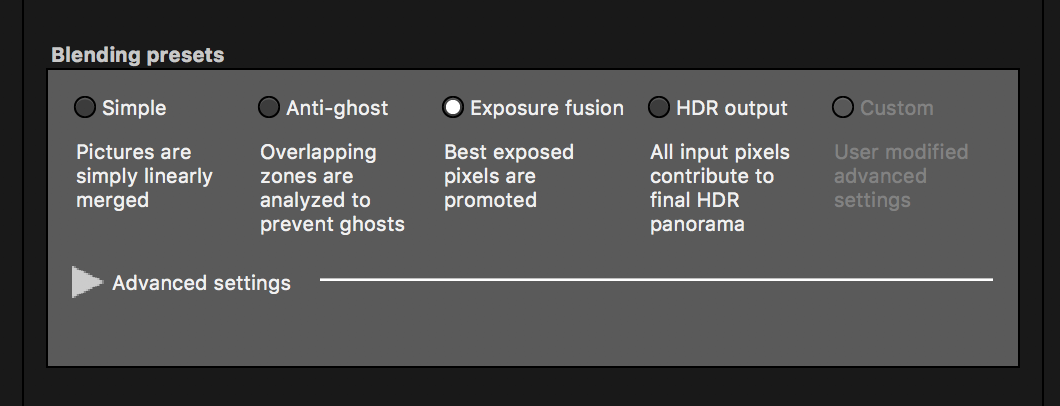
One problem when shooting GigaPixel panoramas is that some parts of your panorama will be very light due to the sun shining directly on them while other areas might be very dark, for example by simply being in the shadow. Finding a compromise exposure for your camera might be difficult and hence we are using bracketing to shoot multiple photos of the same area. Each of these photos will be several exposures apart from the others. For any shot you will have in fact three shots, each with a low, medium and high exposure. When you stitch the panorama together in AutoPano Giga, for example, you can use all three exposures. Autopano has several modes to select the best exposed pixel.
There are two settings that you can play with that will heavily influence how your final panorama will look like. You can set the Color Mode to None, Auto and HDR.
You can also set the Blending Presets to Simple, Anti Ghosting, Exposure Fusion and HDR Output.
I started to play Detroit – Becoming Human and the start of the game introduces us to a world in which most of the work is done by androids. The designers paid attention to portraying every day life with androids. They show androids in the roles of care taker, cleaner, construction worker, but also as a companion. Many humans are without a job but still enjoy an android cleaning their mess. Of course this whole setup is a typical in-out-group setup. But if this is the future we are working towards then we will also have to address these questions. What if there is no more work left for humans? What if we like interacting with androids more than with other humans? Here are some of my highlights of everyday life in the game so far:
Android Parking
Detroit: Become Human
Android compartment in the back of the bus
The androids have to enter the public bus at the rear and are standing in a segregated compartment that is divided by a glass wall. This is of course a reference to Rosa Park who refused to give put her seat in the colored section of a bus for a white person in 1955.
Detroit: Become Human
An article on how autonomous cars make life and death decisions
The game features an article on how autonomous vehicles make life and death decisions by considering a wealth of background information to calculate the value of a person.
When a driverless vehicle foresees an accident, the car’s computer makes life and death decisions – for example deciding which of two pedestrians to hit. But the exact process by which cars make these decisions is not very well understood.
Martin Forlong, of CrowneCars, tries to clarify: “In these situations, the car’s imaging system gathers data to determine, the pedestrian’s age, gender, life Expectancy, etc, in the blink of an eye.” Thisdata is parsed through the public I record “to determine marital status, employment record, life expectancy and whether they have children.” The car then assigns a ‘value’ to each possible victim based on criteria like their contribution to society: “we put a premium on lives that will save other lives, like doctors and nurses.”
All this may sound very reasonable. But Felix Gamble, head of Anti-Automation League (AAL) says the system has no rights to make such judgements: “Somebody with a criminal record is not necessarily less I valuable to society than a doctor. That kind of information is irrelevant to the sanctity of human life.”
But Forlong dismisses such claims: “We want our cars to make the best possible i choices, and that means acting on the basis of all the information they can gather. The more, the better.”