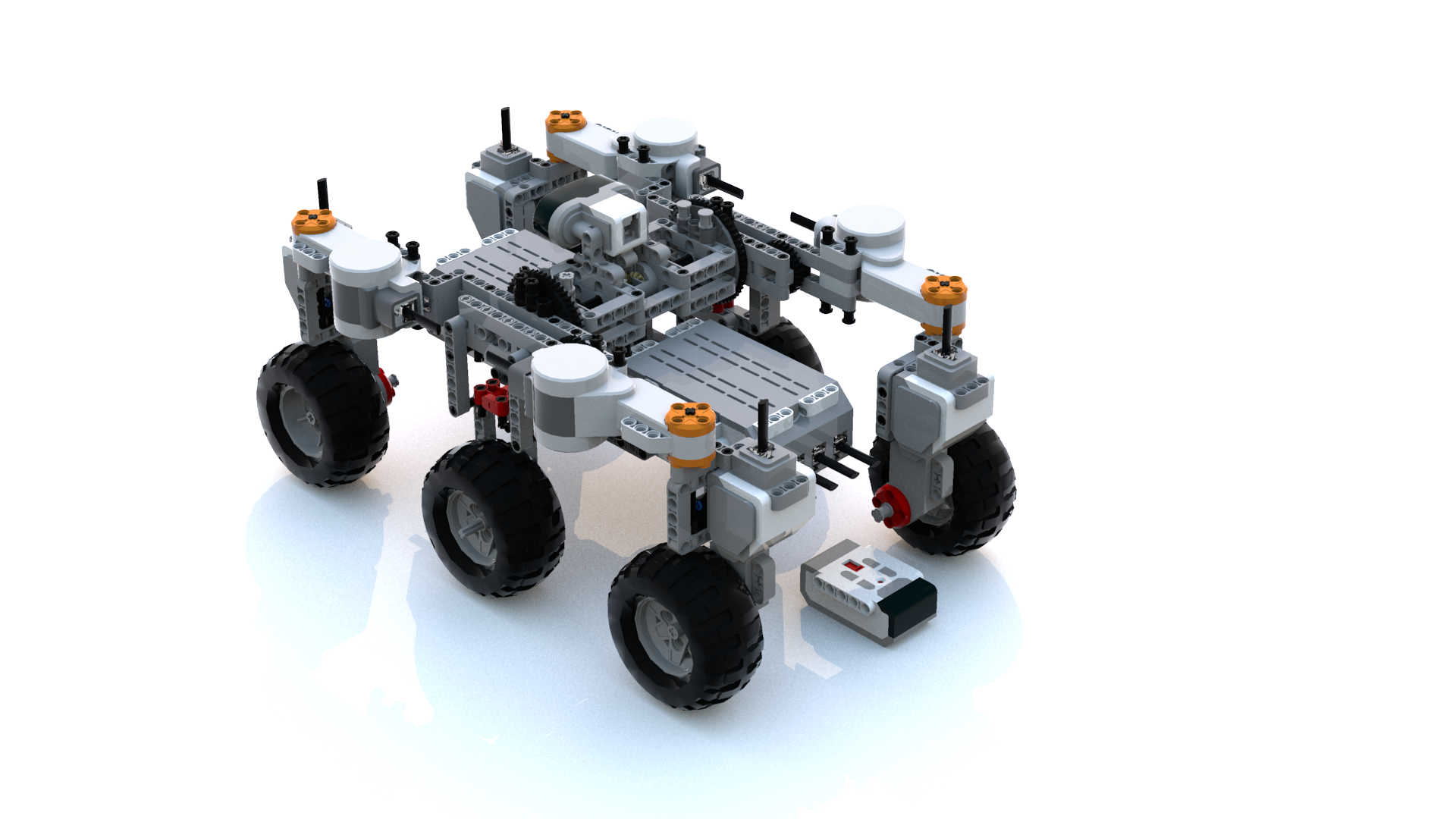
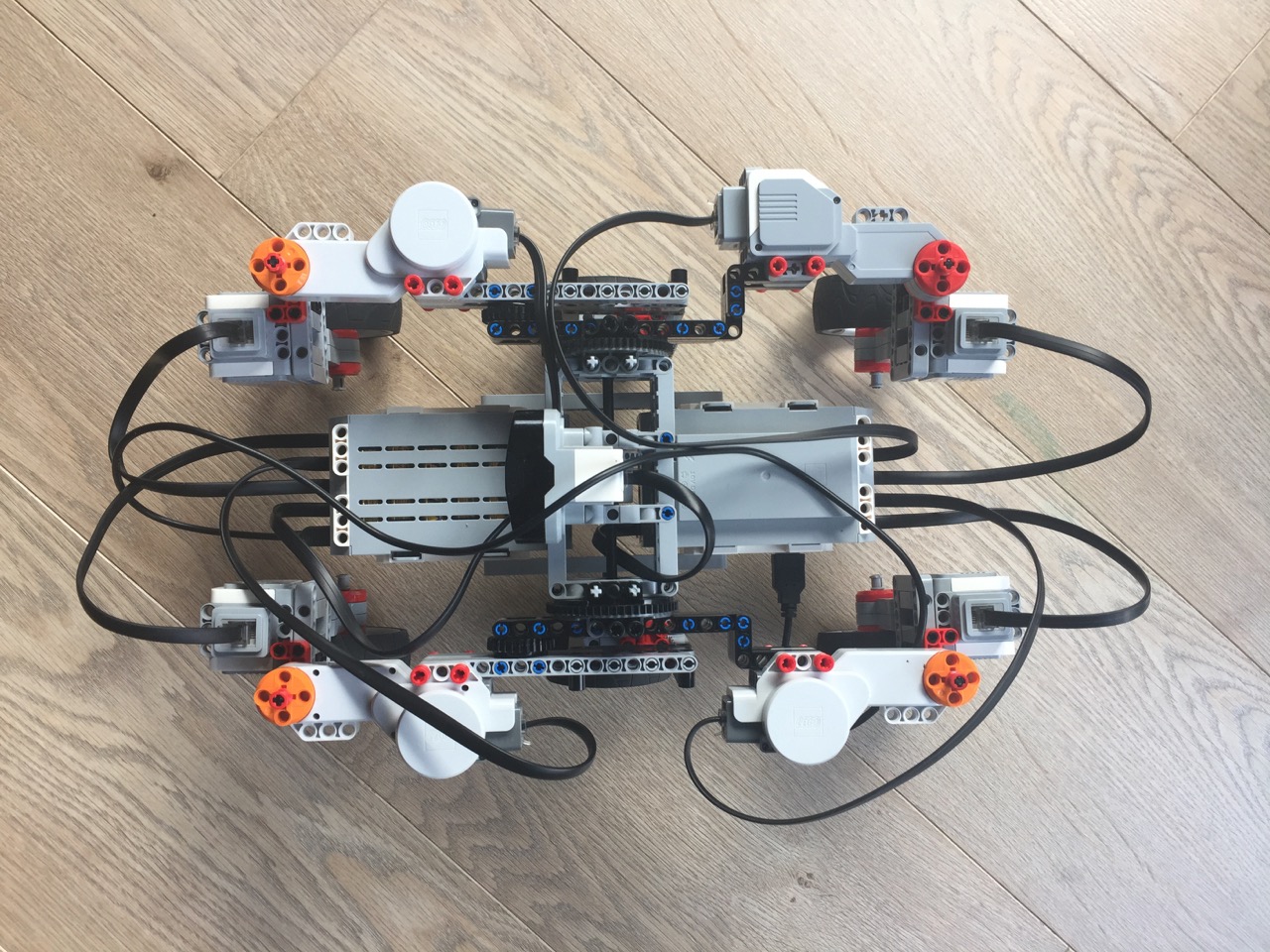
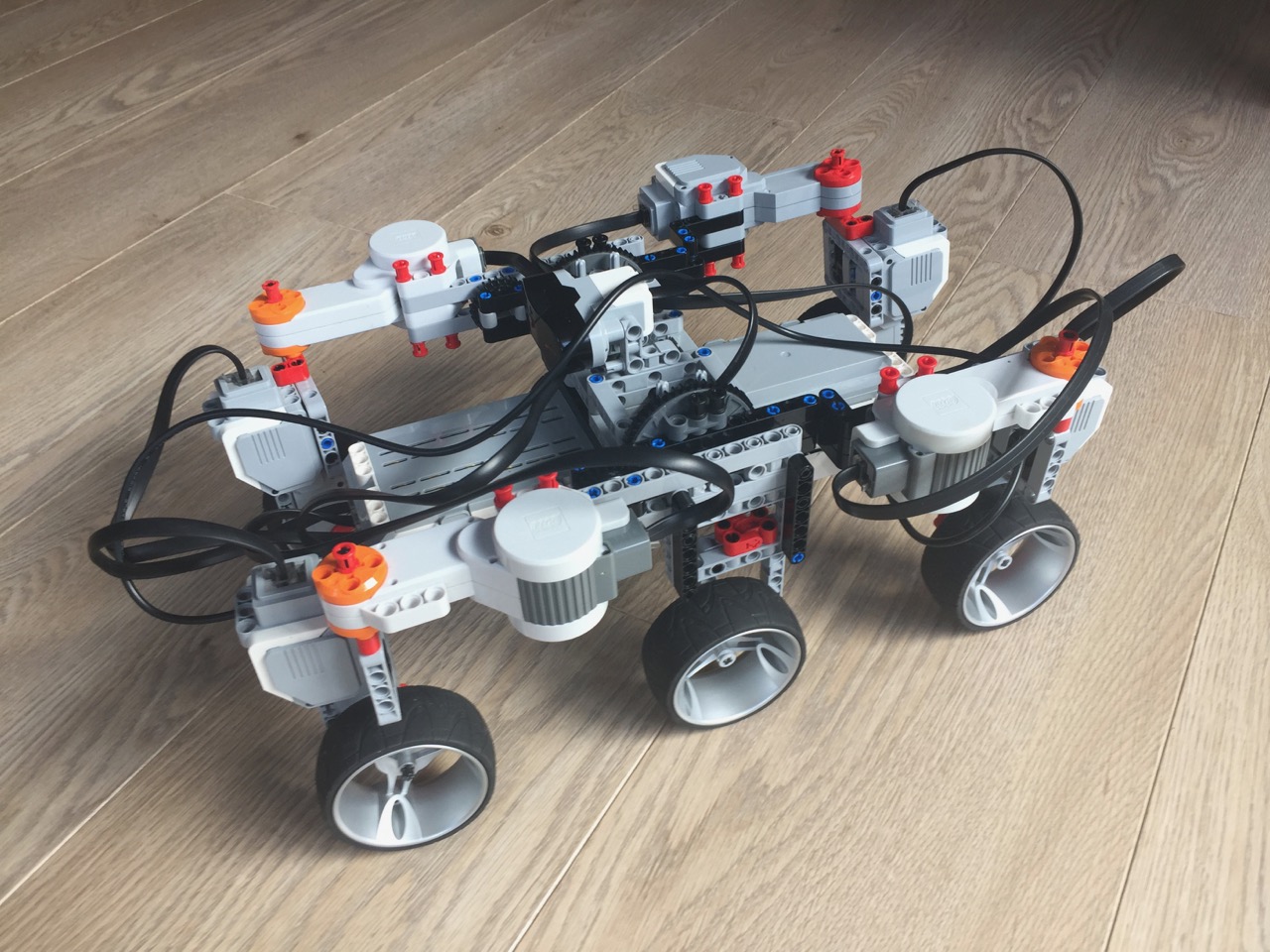
This is simple Mars Rover model using two LEGO Mindstorms EV3 and a total of eight motors. The two EV3 are daisy chained and the model can be controlled using the EV3 IR Remote Control. The model uses the rocker-bogie suspension system including a differential in the middle axis. The two EV3s are suspended and remain horizontal in any position. There are much more complex Mars Rover models already available using many more Mindstorm bricks. My design goal was to keep it simple and experiment with the rocker-bogie suspension system. The principles works, but there is a bit too much flexibility in the model.
The 3D model and the building instructions are available for LEGO Digital Designer. The parts list and instructions are also available at Rebrickable.
We launched our Fonthill Abbey website on which we document our efforts to bring this amazing building and the story of its owner back to life. We created an interactive Virtual Reality Game that allows you to experience a forgotten piece of history as you become Lord Horatio Nelson or Lady Emma Hamilton, guests of mysterious Lord Beckford. You will have the rare privilege of entering secluded Fonthill Abbey and meet its extravagant owner, but will you make it out alive?
Review of the measurement accuracy of the ColorMunki Design and the FRU WR-10.
I am working on a colour project and had purchased the WR10 colorimeter to complement my long serving work horse, the X-Rite Color Munki Design. My ColorMunki is already several years old and I was concerned that its accuracy might have declined. When I measured several hundreds of samples, I noticed that both colorimeters gave me considerably different LAB values.
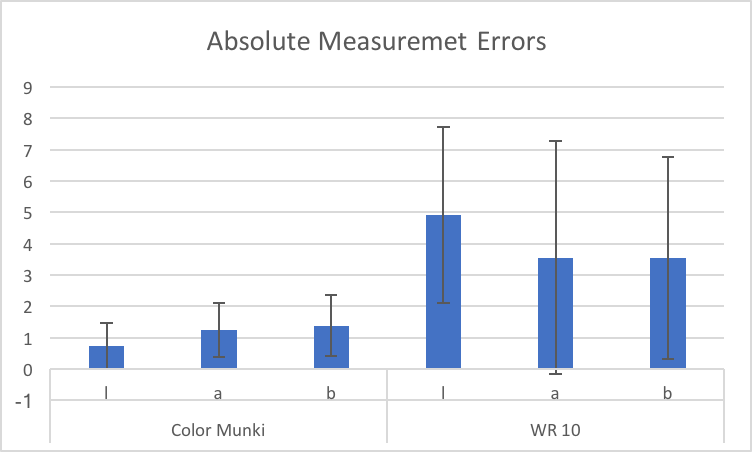
To determine which device was closer to the truth I measured the 48 defined colours of Datacolor’s SpyderCHECKR 48. I calculated the absolute error both devices made. The results of a paired-sample t-test showed that the ColorMunki is producing significantly less measurement errors on L (t(47)=-9.229, p<0.001), L (t(47)=-4.590, p<0.001) and L (t(47)=-4.871, p<0.001). However, both devices measure colours that are significantly different from the target colour of the SpyderCheckr card on all three measurements. Figure 1 shows the means and standard deviation for all measurement errors.
Figure 1: Mean and Standard Deviation of all measurements for both devices.
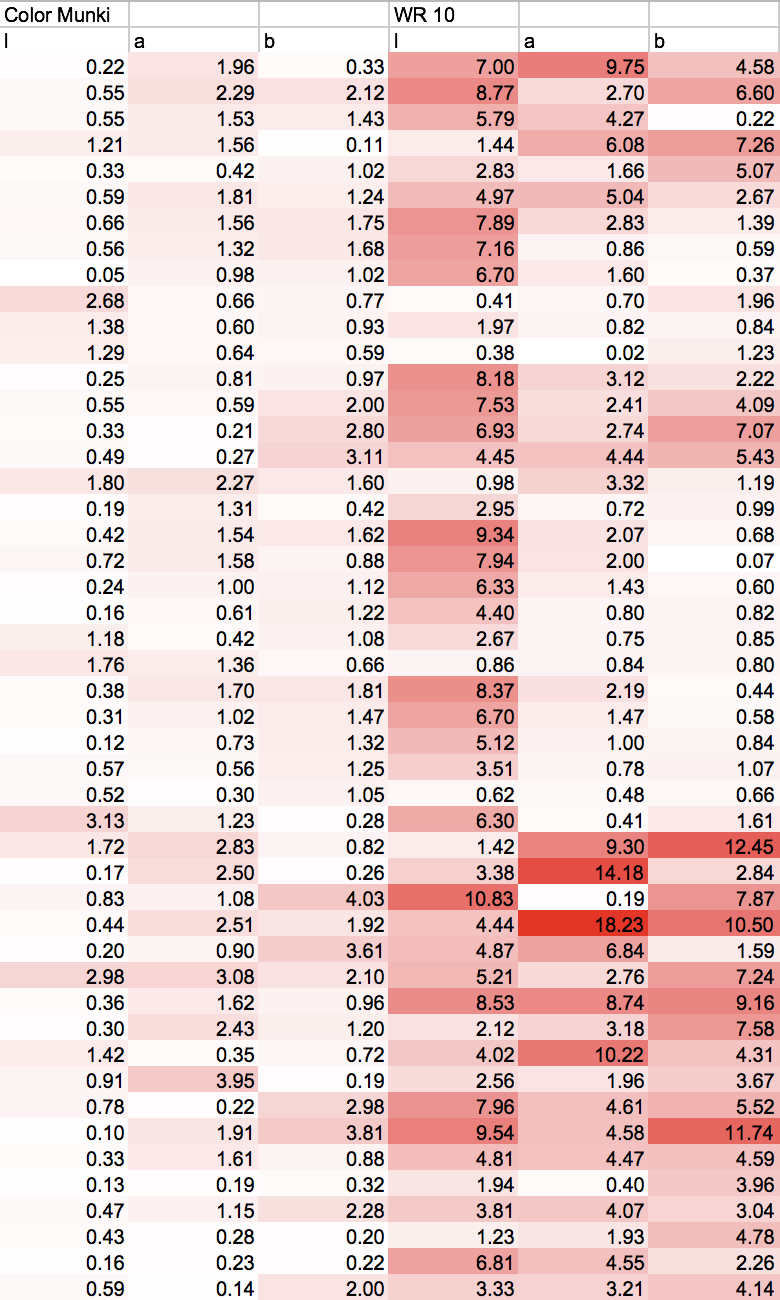
There does seem to be some structure in the errors that WR-10 is producing. Have a look at the heat map (Figure 2). The data for my little experiment is available at the Open Science Framework (DOI: 10.17605/OSF.IO/UWEFD).
Figure 2: Heat Map of the absolute errors
Although both devices show some significant deviation from the original, it is not far off from what can be expected of devices in this price range. The ColorMunki Design produces significantly better results than the FRU’s WR-10QC.
My talk on Persuasive Robots at the Emotional Machines Conference.
I was invited to give a talk at the Interdisciplinary Conference on Emotional Machines in Stuttgart on September 21st, 2017. My talk focused mainly on the work I did in collaboration with Jürgen Brandstetter (doi: 10.1145/2909824.3020257, doi: 10.1177/0261927X15584682, doi: 10.1109/IROS.2014.6942730). My main argument was that the number of robots in our society will increase dramatically and robots will participate in the formation of our language. Through their influence on our language they will be able to nudge our valence related to certain terms. Moreover, it will only take 10% of us to own a robot for them to dominate the development of our language.
This is also the first time I used a 360 degree camera to record a talk. This technology becomes particularly useful when following the discussion between the speaker and the audience. YouTube’s 360 video feature does not work in all web browser (e.g. it does not work with Safari). Chrome and Firefox should be fine.
Esmé E Deprez and Caroline Chen from Bloomberg Businessweek visited the headquarters of Omics in India to interview its owner Srinubabu Gedela about his company. Omics is widely considered a predatory publisher that publishes papers without rigorous peer review. Confronted with the acceptance of my non-sensical paper he replied that “Bartneck’s paper slipped through because it was submitted so close to the conference’s deadline.” Yeah, right.